




-
森林空间结构的定义目前尚没有共识,广义上讲森林空间结构主要是指森林中林木在林分空间中的分布[1-3]。具体讲,森林空间结构就是树木的空间分布格局、树木大小空间排列(或树木竞争)和树种混交[4-5]。森林空间结构是森林最重要的特征之一,通过分析森林的空间结构不仅能够反映单株林木在整个林分中的竞争势,也能反映林分的整体分布情况。通过分析森林空间结构也能看出林分中林木空间生态位,对于研究者分析林分的稳定度,经营者决策林分经营都有很大帮助[6]。目前,对于森林空间结构的研究大多采用外业调查获取林分中林木属性和相互距离等信息[7-9]。“3S”技术是现代森林研究中越来越重要的手段,“3S”技术是指全球定位系统(GPS),遥感(RS),地理信息系统(GIS)的集成,大多是以GPS,RS提供数据源,利用GIS的空间分析等功能对对象进行研究。本研究利用“3S”技术,采用航模飞机搭载数码相机的方式,通过在研究区域北京市鹫峰林场上空飞行拍照获得高分辨率的遥感影像,通过后期影像校正,获取林分中侧柏Platycladus orientalis人工林的林木属性以及空间属性信息,通过外业调查验证,建立合理的回归模型,对研究区域的侧柏人工林空间结构进行分析。
-
鹫峰林场位于北京市西北部,39°54′N,116°28′E。林场境内地形复杂,地势高差较大。最低海拔为11.28 m,最高海拔1 162.70 m。坡度在36°以上的山地占林场总面积的1/4。气候属于华北大陆性季风气候,夏季炎热多雨,冬季干燥寒冷。年均温为12.2 ℃,夏季最高温39.7 ℃,冬季最低温-19.6 ℃,年降水量为700 mm左右,多集中在7月和8月。鹫峰林场内有植物110科313属684种(包括变种和品种)。乔木树种主要有要有侧柏,油松Piuns tabulaeformis,栓皮栎Quercus variabilis,蒙古栎Quercus mongolicus,五角枫Acer elegantulum,刺槐Robinia pseudoacacia,山杨Pupulus davidiana;灌木种类以荆条Vitex negundo,丁香Syringa oblata,胡枝子Leapedeza bicolor,白蜡Fraxinus chinesis为主;草本植物以求米草Oplismenus undulatifolius,大油芒Spodiopogon sibiricus等为主[10]。
-
空间结构指数有很多,但有许多指标是林分某一信息的重复性表达。本研究选取有代表性的混交度、角尺度、大小比数等3个指标。混交度反映了林分空间隔离的程度;大小比数代表林木个体与周边树种相比的竞争力;角尺度代表林木个体在水平地面上的分布情况[10-15]。相邻木的确定使用ArcGIS软件生成的Voronoi图[15-19]。
-
混交度为林分中对象树i的n株最近相邻木中和对象木不属于同一树种的个体所占比例,公式为:${{M}_{i}}=\frac{1}{n}\sum\limits_{j=1}^{n}{{{V}_{ij}}}$。其中Mi代表对象木i的混交度,n代表对象木的最近相邻木株数,Vij代表一个离散型的变量,当对象木i与其第j株最近相邻木为非同种时,Vij = 1,当对象木i与其第j株最近相邻木属于同种时,Vij = 0。
-
大小比数用于表达林木大小差异程度,公式为:${{U}_{i}}=\frac{1}{n}\sum\limits_{j=1}^{n}{{{k}_{ij}}}$。其中Ui代表大小比数,n代表对象木的最近相邻木株数,kij代表离散变量,当对象木i比其最近相邻木j小时,kij = 1,当对象木i比其最近相邻树j大时,kij = 0。
-
角尺度是从指从对象木出发,任意2株对象木的最近相邻木的2个夹角中较小的角α小于标准角α0(360°与最近相邻木株数n的比值)在相邻木中所占的比例。公式为: ${{W}_{i}}=\frac{1}{n}\sum\limits_{j=1}^{n}{{{z}_{ij}}}$。其中Wi代表大小比数,n代表对象木的最近相邻木株数,zij代表离散变量,当α的值小于标准角α0时,zij = 1,当α的值大于标准角α0时,zij = 0。
-
鹫峰林场人工林大多为1958年营造,立地条件等因素造成不同的生长状况。根据林相图记录的2004年鹫峰林场107个小班的详细数据,以小班蓄积量和小班平均胸径作为主要的衡量指标,运用SPSS 18.0软件,采用聚类分析的方法,对鹫峰林场小班林分的生长状况分成良好、一般、较差等3类。为了便于对比研究,研究区域应包括不同生长状况的侧柏人工林。由于航模拍摄范围较小,飞行高度较低,坡度过大则对生成的影像精准度有很大影响,确定研究区域时充分考虑到选择坡度较为舒缓的区域。此外,还需要考虑到航模飞机起飞降落地点以及交通等因素。利用数字高程模型(DEM)生成鹫峰林场坡度和坡向图。经过衡量,最后选择鹫峰林场北部作为飞行区域,区域内包括生长状况一般和良好的侧柏人工林小班。研究区域内坡度缓和,绝大部分坡度在15°以下。
-
航模拍摄相片分辨率高,拍摄区域小,地面明显校正点较少,难以使用地形图直接校正。首先利用ERDAS软件将航模拍摄的相片进行拼接,然后选取分辨率为1 m的同时期的航空相片用地形图校正,最后用校正好的航片对航模拍摄拼接相片进行校正。选取航模拍摄相片中公路、林间小路、林线、林中建筑物等易于辨识的点做为校正点,将校正好的航模拍摄相片与航空相片叠加显示如图 1所示。最后通过1∶1万数字高程模型数据进行地形校正,消除地形误差。

图 1 航模照片几何校正后与航片叠加显示(鹫峰林场北部区域)结果
Figure 1. Superposition results of model aircraft photos after geometric correction and air photos
-
在航模拍摄的相片中选择12块20 m × 20 m样地,其中侧柏人工林生长状况一般的6个,记做A1,A2,A3,A4,A5,A6,生长状况良好的6个,记做B1,B2,B3,B4,B5,B6。利用ArcGIS软件,提取6块样地内乔木的树冠大小、位置距离等信息。建立面文件保存划定的样地边界,建立点文件保存样方内树木的位置,侧柏、油松等针叶树以树梢作为其位置点,五角枫、栓皮栎等阔叶树以冠幅中心点(人为判定)作为其位置点,进行每木编号。建立线文件用来保存样方内树木与其最近相邻木间的距离以及树木冠幅数据,距离信息利用ArcGIS软件的Calculate Geometry工具计算得到。
-
由于样地内地形地势的影响,从图像上获取信息与实地信息有一定误差,通过分析两者之间的关联性,建立线性回归模型,用以修正从图像上获取的信息。利用GPS定位以及航片和实地对照确定样方A1,A2,A3,B1,B2,B3的实地位置。对样方内乔木进行每木检尺,胸径4 cm起测。记录样方内乔木树种、胸径、树冠大小、株数、位置分布、样方坡度、坡位、海拔等信息。
-
利用实地调查数据和从影像获取数据分别计算6块样地的混交度、大小比和角尺度。从影像获取数据计算结果作为自变量,实地调查数据计算结果作为因变量,对2个样地的3个空间结构指数进行回归分析,结果如表 1所示。
表 1 线性回归系数
Table 1. Linear regression coefficients
样方编号 混交度 大小比 角尺度 回归系数A 截距S R2 回归系数A 截距S R2 回归系数A 截距S R2 A1 0.985 7 0 0.731 0.943 6 0.144 0.756 1.013 0 0 0.821 A2 0.952 4 0 0.826 0.962 3 0 0.824 0.925 6 0.096 0.932 A3 0.992 1 0 0.955 0.953 2 0 0.887 0.978 8 0 0.844 A 0.972 3 0 0.899 0.951 0 0 0.856 0.962 8 0 0.856 B1 0.973 2 0 0.797 1.095 0 0 0.923 0.972 6 0 0.865 B2 1.052 1 0.013 0.924 1.052 7 0 0.994 0.913 5 0 0.911 B3 0.954 4 0 0.863 1.012 2 0 0.913 0.942 8 0 0.968 B 0.988 1 0 0.887 1.046 8 0 0.934 0.951 1 0 0.920 分析发现6组数据的线性相关系数R2都在70%以上,显著性检验P<0.05。说明从影像获取数据计 分析发现6组数据的线性相关系数R2都在70%以上,显著性检验P<0.05。说明从影像获取数据计算结果与实地调查数据计算结果具有较大相关性。线性回归方程系数A都在0.90到1.10之间,说明从影像获取数据非常接近实际林分。通过综合计算A1,A2,A3,B1,B2,B3实地调查数据计算结果和从影像获取数据计算结果的回归关系,得到研究区域A和B 3个空间指数的回归方程,从影像获取剩余样地A4,A5,A6,B4,B5,B6的空间信息,将空间指数的计算结果引入回归方程,可以使最终得到的空间指数更接近实际林分。
-
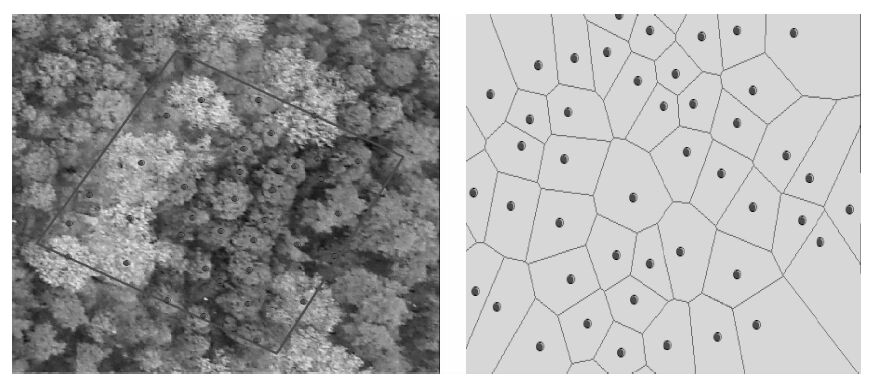
对象木的相邻木株数n是林分空间结构研究中最重要的参数之一,如果n取值过大,会将与对象木无关的林木也计算在内,若果n取值过小,又会导致与对象木有关的林木没有计算在内。以往研究中,对于n的取值大多采取固定数据4来用于计算[12-16]。为了更好地计算林分空间结构,能充分反应林分实际情况,本研究采取通过Voronoi图分析来确定n的取值。Voronoi图是由一组连续的多边形组成,这些多边形由连接其中两邻点直线的垂直平分线构成。Voronoi图属于对空间划分的一种新的方式,图中任意一个凸多边形中任意一个内点到该凸多边形的控制点的距离不大于该点到其他任何控制点的距离。使用Voronoi图来确定相邻木,可以使相邻木具有最近性和相邻性的特征[10]。与对象木所在Voronoi多边形相邻Voronoi多边形内的林木就是最近相邻木。因此,对象木的最近相邻木株数就是与对象木所在多边形的相邻Voronoi多边形的个数。
在ArcGIS软件中,使用ArcToolbox中的Creat Thiessen Polygons工具生Voronoi图。如图 2所示(以样方A1为例)。分析Voronoi图可以看出,对象木的相邻木取值在4到7之间,绝大多数集中在5和6上。充分考虑研究区域林分的空间分布,本研究将n的值统一定义为5。

图 2 利用ArcGIS生成Voronoi图
Figure 2. Voronoi figure generated by ArcGIS
-
混交度是反映林分中林木混交程度的重要指标。当混交度值为0时,为零度混交,值为0.2时,为弱度混交,值为0.4和0.6时,为中度混交,值为0.8时,为强度混交,值为1.0时,为完全混交。混交度的计算结果如表 2所示。
表 2 样地各树种混交度值百分比
Table 2. Mingling calculation results
人工林 树种 不同混交度值百分比/% M 0 0.2 0.4 0.6 0.8 1.0 生长状一般的侧柏人工林 侧柏 19 61 10 5 5 0 0.23 油松 0 8 25 33 17 17 0.62 构树 0 0 0 50 50 0 0.70 臭椿 0 0 0 0 0 100 1.00 五角枫 0 0 0 0 0 100 1.00 牛长状况较好的侧柏人工林 侧柏 11 44 25 8 8 4 0.34 油松 10 52 31 4 0 3 0.28 五角枫 0 0 0 0 33 67 0.93 栓皮栎 0 0 0 0 0 100 1.00 在生长状况一般的人工侧柏林中主要树种侧柏混交度值大都集中在0和0.2,属于人工纯林到弱度混交阶段。混交树种主要有油松,构树Brussonetia papyrifera,臭椿Ailanthus altissima,五角枫等,臭椿和五角枫株数较少,混交度达到了完全混交的程度。在生长状况较好的人工侧柏林中样方内主要树种侧柏混交度值大都集中在0.2和0.4,属于弱度混交阶段。混交树种主要有油松、五角枫、栓皮栎等。五角枫和栓皮栎株为强度混交和完全混交。
-
以树冠大小作为指标比较样地内不同树种的大小比值,以此来反映林分中树种的地位。把大小比值为0的认定为树种在竞争中处于优势地位,值为0.2的认定为树种在竞争中处于亚优势地位,值为0.4和0.6的认定为树种在竞争中处于中庸地位,值为0.8的认定为树种在竞争中处于劣势地位,值为1的认定为树种在竞争中处于绝对劣势地位。样方大小比计算结果如表 3所示。
表 3 样地各树种大小比值百分比
Table 3. Neighborhood comparison calculation results
人工林 树种 不同混交度值百分比/% U 0 0.2 0.4 0.6 0.8 1.0 生长状况一般的侧柏人工林 侧柏 5 7 7 19 30 32 0.71 油松 17 25 33 17 8 0 0.34 构树 0 50 50 0 0 0 0.40 臭椿 100 0 0 0 0 0.00 五角枫 100 0 0 0 0 0 0.00 生长状况较好的侧柏人工林 侧柏 3 3 17 33 30 14 0.65 油松 10 26 38 16 10 0 0.38 五角枫 33 33 33 0 0 0 0.20 栓皮栎 100 0 0 0 0 0 0.00 在生长状况一般的侧柏人工林中,侧柏处于绝对劣势、劣势和中庸地位的分别占32%,30%和26%,说明侧柏在混交竞争中处于劣势地位。油松处于中庸地位的占50%,说明油松在竞争中处于中庸地位。五角枫在竞争中处于绝对优势的地位。这和在人工侧柏林中,臭椿和五角枫等阔叶树树冠冠幅较大有关。构树作为伴生树种,在竞争中处于中庸的地位,随着侧柏人工林的生长而被逐渐淘汰。
在生长状况较好的侧柏人工林中,侧柏处于绝对劣势、劣势和中庸地位的分别占14%,30%和50%,说明侧柏在混交竞争中处于劣势到中庸地位的过渡。油松处于劣势和中庸地位的分别占10%和54%,说明油松在竞争中处于中庸地位。五角枫在竞争中处于优势的地位,栓皮栎处于绝对优势的地位。由于五角枫和栓皮栎等阔叶树株数较少且冠幅大于侧柏,在与侧柏的竞争中处于优势地位。
-
本研究选用n
为5,标准角为72°。计算结果如表 4所示。认定当角尺度取值为1.0时,代表分布很不均匀,取值为0.8时,分布不均匀,取值为0.6和0.4时,分布随机,取值为0.2时,分布均匀,取值为0时,分布很均匀。根据惠刚盈等的定义,当角尺度的均值在0.48和0.52之间时,代表林分随机分布,角尺度的均值小于0.48时,均匀分布,角尺度的均值大于0.52时,团状分布[13]。 表 4 样地各树种角尺度值百分比
Table 4. Angular scale calculation
人工林 树种 大小比/% W 0 0.2 0.4 0.6 0.8 1.0 生长状况一般的侧柏人工林 侧柏 22 51 10 10 7 0 0.26 油松 8 17 41 17 17 0 0.44 构树 0 0 0 50 50 0 0.70 臭椿 0 0 0 0 100 0 0.80 五角枫 0 0 0 0 50 50 0.90 生长状况较好的侧柏人工林 侧柏 8 25 33 17 17 0 0.41 油松 5 11 42 20 11 11 0.51 五角枫 0 0 33 33 33 0 0.60 栓皮栎 0 0 0 0 100 0 0.80 在生长状况一般的侧柏人工林中,侧柏主要处于分布很均匀和均匀,分别占22%和51%,属于均匀分布;油松主要处于分布均匀和随机,分别占17%和58%,属于由分布均匀到分布随机过渡;构树、臭椿和栓皮栎主要处于分布不均匀。整个林分的平均角尺度为0.37,说明林分整体处于均匀分布状态。
在生长状况较好的侧柏人工林样地中,侧柏主要处于均匀和随机分布,分别占25%和50%,属于均匀分布到随机分布过渡;油松的平均角尺度为0.51,主要处于均匀和随机分布,分别占11%和62%,属于分布随机阶段;五角枫和栓皮栎主要处于分布不均匀。整个林分的平均角尺度为0.49,说明林分整体处于随机分布的阶段。
-
分析发现生长状况一般的侧柏人工林处于由纯林到弱度混交过渡阶段,均匀分布,侧柏在竞争中处于劣势地位,五角枫在竞争中处于绝对优势的地位,构树作为伴生树种,在竞争中处于中庸的地位,随着侧柏人工林的生长而被逐渐淘汰。生长状况较好的侧柏人工林处于弱度混交阶段,随机分布,侧柏在林分竞争中处于中庸地位,五角枫、栓皮栎等阔叶树在竞争中处于优势地位。
本研究使用航模飞机拍摄相片作为数据源,简单易行且成本较低,通过后期图像校正并通过外业实地验证调查来反演,可以得到精确的林木树冠、空间位置等信息,省去大量的人力物力做外业调查。在分析计算林分空间结构中,采用ArcGIS的Voronoi图功能来确定与对象木最邻近的林木株数n,更能充分反映林分的实际空间分布。使用航模获取的相片可以较为精确地获取树冠大小、林木空间位置,除了用作分析空间结构外,还可以间接分析生物量、绿量等,在未来的林业研究中会有更广泛的应用。
Acquisition and analysis spatial structure of Platycladus orientalis plantations based on 3S
-
摘要: 采用航模飞机搭载数码相机的方式,在研究区域北京市鹫峰林场上空飞行拍照获得高分辨率的遥感影像,通过后期影像校正,提取林分中林木属性以及空间属性信息,通过外业调查验证,建立线性回归模型,显著性检验P<0.05。选取混交度、角尺度和大小比等3个指数计算林分的空间结构,分析发现生长状况一般的侧柏Platycladus orientalis人工林处于由纯林到弱度混交过渡阶段,均匀分布,侧柏在竞争中处于劣势地位。生长状况较好的侧柏人工林处于弱度混交阶段,随机分布,侧柏在林分竞争中处于中庸地位,五角枫Acer elegantulum和栓皮栎Quercus variabilis等阔叶树在竞争中处于优势地位。Abstract: High resolution remote sensing images of the study area were obtained with a digital camera bound to a model airplane. Then,images were corrected with forest characteristics and spatial attributes of Platycladus orientalis stands. Finally,a linear regression model was developed and tested based on field investigation,verification,and significance testing(P<0.05). Next,spatial structure of different forest stands in the survey region were analyzed using three classic spatial structure indexes:1)index-uniform angle index,2) neighborhood comparison,and 3)mingling. Results showed that growth in P. orientalis plantations was generally in a transition stage from unmixed to slightly mixed with a favorable distribution;however,the plantations were in a weak position in the completion. P. orientalis plantations that were slightly mixed and had good growth with a random distribution,varied in the completion.
-
图 1 航模照片几何校正后与航片叠加显示(鹫峰林场北部区域)结果
Figure 1 Superposition results of model aircraft photos after geometric correction and air photos
表 1 线性回归系数
Table 1. Linear regression coefficients
样方编号 混交度 大小比 角尺度 回归系数A 截距S R2 回归系数A 截距S R2 回归系数A 截距S R2 A1 0.985 7 0 0.731 0.943 6 0.144 0.756 1.013 0 0 0.821 A2 0.952 4 0 0.826 0.962 3 0 0.824 0.925 6 0.096 0.932 A3 0.992 1 0 0.955 0.953 2 0 0.887 0.978 8 0 0.844 A 0.972 3 0 0.899 0.951 0 0 0.856 0.962 8 0 0.856 B1 0.973 2 0 0.797 1.095 0 0 0.923 0.972 6 0 0.865 B2 1.052 1 0.013 0.924 1.052 7 0 0.994 0.913 5 0 0.911 B3 0.954 4 0 0.863 1.012 2 0 0.913 0.942 8 0 0.968 B 0.988 1 0 0.887 1.046 8 0 0.934 0.951 1 0 0.920 分析发现6组数据的线性相关系数R2都在70%以上,显著性检验P<0.05。说明从影像获取数据计  下载: 导出CSV
下载: 导出CSV
表 2 样地各树种混交度值百分比
Table 2. Mingling calculation results
人工林 树种 不同混交度值百分比/% M 0 0.2 0.4 0.6 0.8 1.0 生长状一般的侧柏人工林 侧柏 19 61 10 5 5 0 0.23 油松 0 8 25 33 17 17 0.62 构树 0 0 0 50 50 0 0.70 臭椿 0 0 0 0 0 100 1.00 五角枫 0 0 0 0 0 100 1.00 牛长状况较好的侧柏人工林 侧柏 11 44 25 8 8 4 0.34 油松 10 52 31 4 0 3 0.28 五角枫 0 0 0 0 33 67 0.93 栓皮栎 0 0 0 0 0 100 1.00
下载: 导出CSV
表 3 样地各树种大小比值百分比
Table 3. Neighborhood comparison calculation results
人工林 树种 不同混交度值百分比/% U 0 0.2 0.4 0.6 0.8 1.0 生长状况一般的侧柏人工林 侧柏 5 7 7 19 30 32 0.71 油松 17 25 33 17 8 0 0.34 构树 0 50 50 0 0 0 0.40 臭椿 100 0 0 0 0 0.00 五角枫 100 0 0 0 0 0 0.00 生长状况较好的侧柏人工林 侧柏 3 3 17 33 30 14 0.65 油松 10 26 38 16 10 0 0.38 五角枫 33 33 33 0 0 0 0.20 栓皮栎 100 0 0 0 0 0 0.00
下载: 导出CSV
表 4 样地各树种角尺度值百分比
Table 4. Angular scale calculation
人工林 树种 大小比/% W 0 0.2 0.4 0.6 0.8 1.0 生长状况一般的侧柏人工林 侧柏 22 51 10 10 7 0 0.26 油松 8 17 41 17 17 0 0.44 构树 0 0 0 50 50 0 0.70 臭椿 0 0 0 0 100 0 0.80 五角枫 0 0 0 0 50 50 0.90 生长状况较好的侧柏人工林 侧柏 8 25 33 17 17 0 0.41 油松 5 11 42 20 11 11 0.51 五角枫 0 0 33 33 33 0 0.60 栓皮栎 0 0 0 0 100 0 0.80
下载: 导出CSV
-
[1] MASON W L,QUINE C P. Silvicultural possibilities for increasing structural diversity in Brutish spruce forest:the case of Kielder forest[J]. For Ecol Manage,1995,79(1/2):13-28. [2] FERRIS R,HUMPHREY J W. A review of potential biodiversity indicators for application in British forest[J]. Forestry,1999,72(4):313-328. [3] POMMERENING A. Approaches to quantifying forest structures[J]. Forestry,2002,75(3):305-324. [4] AGUIRRE O,HUI Gangying,von GADOW K,et al. An analysis of spatial forest structure using neighbourhood-based variables[J]. For Ecol Manage,2003,183(1/3):137-145. [5] 汤孟平. 森林空间结构研究现状与发展趋势[J]. 林业科学,2010,46(1):117-120. TANG Mengping. Advances in study of forest spatial structure[J]. Sci Silv Sin,2010,46(1):117-120. [6] 汤孟平,唐守正,雷相东,等. 林分择伐空间结构优化模型研究[J]. 林业科学,2004,40(5):25-31. TANG Mengping,TANG Shouzheng,LEI Xiangdong,et al. Study on spatial structure optimizing model of stand selection cutting[J]. Sci Silv Sin,2004,40(5):25-31. [7] 赵中华,惠刚盈,袁士云,等. 小陇山锐齿栎天然林空间结构特征[J]. 林业科学,2009,45(3):1-6. ZHAO Zhonghua, HUI Gangying,YUAN Shiyun,et al. Spatial structure characteristic of Quercus aliena var. acuteserrata natural forest in Xiaolongshan[J]. Sci Silv Sin,2009,45(3):1-6. [8] 侯向阳,韩进轩. 长白山红松林主要树种空间结构模拟分析[J]. 植物生态学报,1997,21(3):242-249. HOU Xiangyang,HAN Jinxuan. Simulation analysis of spatial pattern of main species in the Korean-pine broadleaved forest in Changbai mountain[J]. Acta Phytoecol Sin,1997,21(3):242-249. [9] 邓英英,汤孟平,徐文兵,等. 天目山近自然毛竹纯林的竹秆空间结构特征[J]. 浙江农林大学学报,2011, 28(2):173-179. DENG Yingying,TANG Mengping,XU Wenbing,et al. Spatial structure of bamboo culm of an almost natural pure Phyllostachys pubescens forest in Mount Tianmu[J]. J Zhejiang A & F Univ, 2011,28(2):173-179. [10] 刘彦君. 应用三维模拟进行林分空间结构及竞争的研究[D]. 北京:北京林业大学,2011. LIU Yanjun. Study of Forest Stand Spatial Structure and Competition Based on Three-Dimensional Simulation Technique[D]. Beijing:Beijing Forestry University,2011. [11] 惠刚盈,胡艳波. 混交林树种空间隔离程度表达方式的研究[J]. 林业科学研究,2001,14(1):23-27. HUI Gangying,HU Yanbo. Measuring species spatial isolation in mixed forests[J]. For Res, 2001,14(1):23-27. [12] 惠刚盈. 森林空间结构量化分析方法[M]. 北京:中国科学技术出版社,2003:63-212. [13] 惠刚盈,von GADOW K,ALBERT M. 角尺度——一个描述林木个体分布格局的结构参数[J]. 林业科学,1999,35(1):37-42. HUI Gangying,von GADOW K,ALBERT M. The neighbourhood pattern:a new structure parameter for describing distribution of forest tree position[J]. Sci Silv Sin,1999,35(1):37-42. [14] 张思玉,郑世群. 笔架山常绿阔叶林优势种群种内种间竞争的数量研究[J]. 林业科学,2001, 37(专刊1):185-188. ZHANG Siyu,ZHENG Shiqun. Quantitive study on intraspecific and interspecific competition for dominant population of evergreen broadleaved forest in Bijia Mountain[J]. Sci Silv Sin, 2001,37(supp 1):185-188. [15] 惠刚盈,von GADOW K,ALBERT M. 一个新的林分空间结构参数——大小比数[J]. 林业科学研究, 1999,12(1):1-6. HUI Gangying,von GADOW K,ALBERT M. A new parameter for stand spatial structure neighbourhood comparison[J]. For Res,1999,12(1):1-6. [16] 汪平,贾黎明,魏松坡,等. 基于Voronoi图的侧柏游憩林空间结构分析[J]. 北京林业大学学报,2013,35(2):43-48. WANG Ping,JIA Liming,WEI Songpo,et al. Analysis of stand spatial structure of Platycladus orientalis recreational forest based on Voronoi diagram method[J]. J Beijing For Univ,2013,35(2):43-48. [17] 赵春燕,李际平,李建军. 基于Voronoi图和Delaunay三角网的空间结构量化分析[J]. 林业科学,2010,46(6):78-84. ZHAO Chunyan,LI Jiping,LI Jianjun. Quantitative analysis of forest stand spatial structure based on Voronoi diagram & Delaunay triangulated network[J]. Sci Silv Sin,2010,46(6):78-84. [18] 汤孟平,陈永刚,施拥军. 基于Voronoi图的群落优势树种种内种间竞争[J]. 生态学报,2007, 27(11):4707-4716. TANG Mengping,CHEN Yonggang,SHI Yongjun. Intraspecific and interspecific competition analysis of community dominant plant populations based on Voronoi diagram[J]. Acta Ecol Sin,2007,27(11):4707-4716. [19] 王懿祥,陈永刚,汤孟平,等. 基于GIS和.NET的插件式森林空间结构分析系统[J]. 浙江农林大学学报,2011,28(5):720-726. WANG Yixiang,CHEN Yonggang,TANG Mengping,et al. A plugin analysis system for forest spatial structure based on GIS and.NET[J]. J Zhejiang A & F Univ,2011,28(5):720-726. -

-
链接本文:
https://zlxb.zafu.edu.cn/article/doi/10.11833/j.issn.2095-0756.2014.01.009
 点击查看大图
点击查看大图

计量
- 文章访问数: 4540
- HTML全文浏览量: 786
- PDF下载量: 604
- 被引次数: 0
