




-
近年来,中国温室生产装备发展迅速,智能农机在提高温室生产经济效益方面发挥越来越重要的作用[1]。自动导航技术正成为智能化温室装备的研究热点,其中位置测量和导航路径跟踪控制是自动导航系统的两大核心技术[2]。在位置测量方面,全球定位系统(global position system,GPS)[3]被广泛用于自动导航农机定位研究中,但是大多用于室外大田环境,信号在室内衰减严重,定位效果不佳[4],在室内应用受到了限制。许多学者选择机器视觉[5]、红外[6]、电磁[7]和无线传感[8-9]等实现室内定位方法。机器视觉可以检测试验环境中丰富的信息,但是受到光照等不可控因素影响较大。红外和电磁需预先铺设引导线,更改或扩充路径麻烦,灵活性较差。超宽带(ultra-wide band,UWB)是一种室内无线定位方法,其数据传输速度快且精度高,适合于温室环境定位使用。林相泽等[10]使用UWB在温室内动态静态定位精度为6.6 cm,动态定位大部分距离误差在15.0 cm以上。孙小文等[11]在仓储环境内为自动导航车(AGV)定位动态试验精度为8.5 cm。在导航控制方面,纯追踪[12]是一种基于几何运算的方法,理论知识不复杂,但是前视距离的确定较困难。模糊控制是建立在以人的知识及经验的基础上的一种智能控制方法,有较强的鲁棒性和容错性。石翔等[13]以横向和航向偏差为输入,根据专家经验制定模糊规则输出前视距离;熊中刚等[14]采用模糊免疫PID控制算法实现前轮转向导航控制,直线跟踪偏差不大于4.0 cm,曲线跟踪偏差平均偏差为12 cm;XUE等[15]结合模糊控制与机器视觉,设计了机器人的路径跟踪控制器;ABIYEV等[16]以误差和误差变化率为输入量,速度为输出量设计模糊控制器,为自行设计的机器人进行导航控制,沿着30.0 m的引导线行驶最大引导误差为15.8 mm。上述研究未充分考虑不同工况时输入量之间的权重,且采用固定模糊控制规则,无法对模糊控制规则进行自调整。本研究采用超宽带技术构建无线定位系统,获取温室生产平台的位置信息,采用一种带有自调整函数的模糊控制器自动调整各输入变量的权重,以实现最佳的前轮转向角输出。最后采用实车进行直线和矩形路径跟踪试验,并与传统纯追踪方法进行对比,以验证本研究方法的有效性。
-
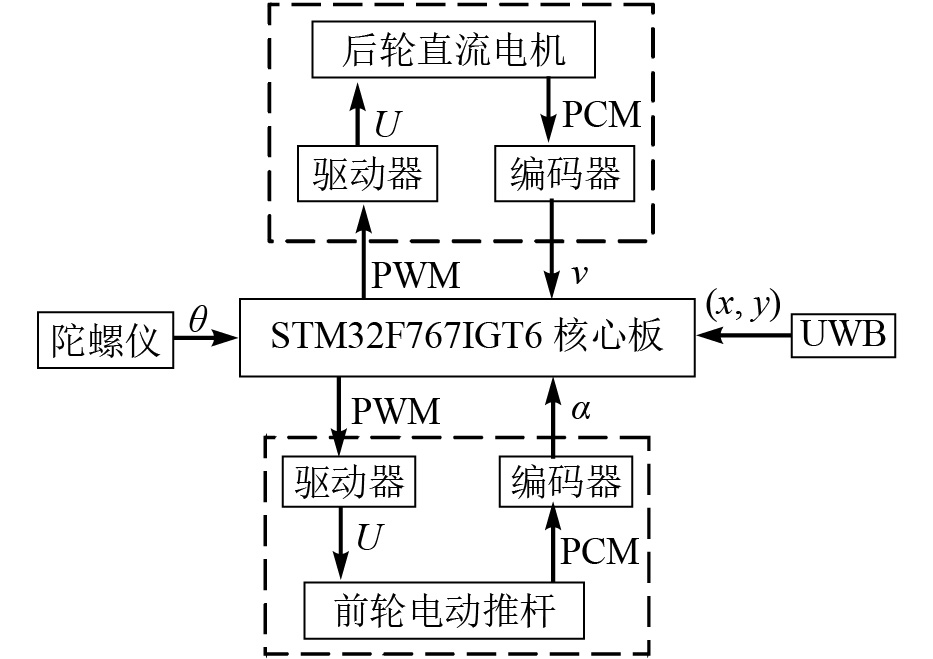
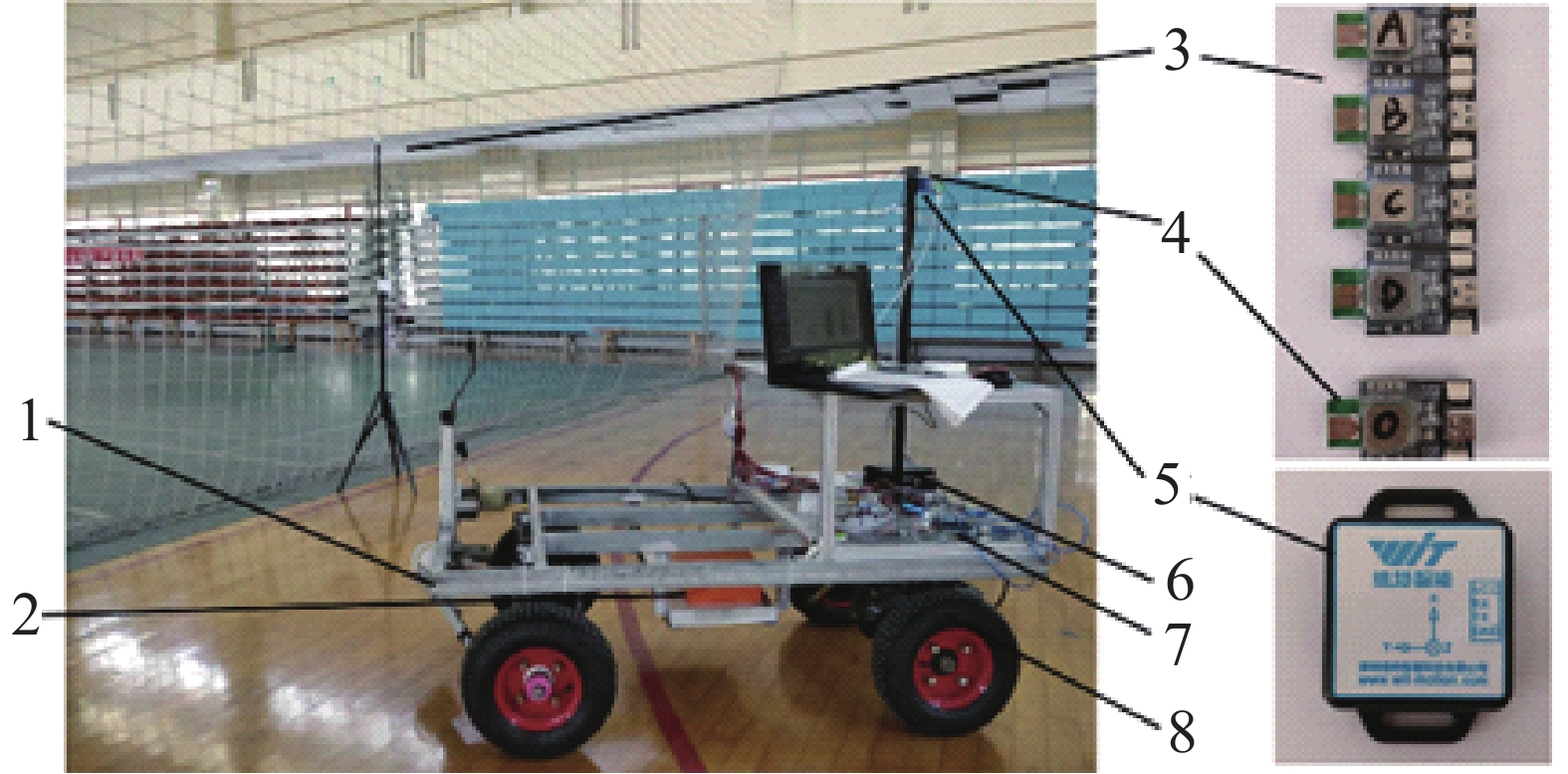
试验平台为纯电动4轮机构,采用前轮转向后轮驱动,由锂电池(48 V,20 Ah)供电,车体长宽高为1 300 mm×700 mm×1 250 mm,轮距和轴距分别为550 mm、840 mm,如图1所示。采用电动推杆推动梯形4杆机构实现转向,推杆行程为200 mm,由L298N驱动器驱动转向角范围为−32°~32°。后轮由直流电机通过减速器与差速器驱动,驱动器型号为AQMD6020BLS。平台的位置信息分别由超宽带无线定位系统和电子陀螺仪提供。超宽带模块数据传输频率为1~50 Hz,陀螺仪(WT901C)为平台提供航向信息,测量范围为−180°~180°,精度为0.1°。采用STM32F767IGT6单片机作为试验平台的主控制器。控制系统原理如图2所示。
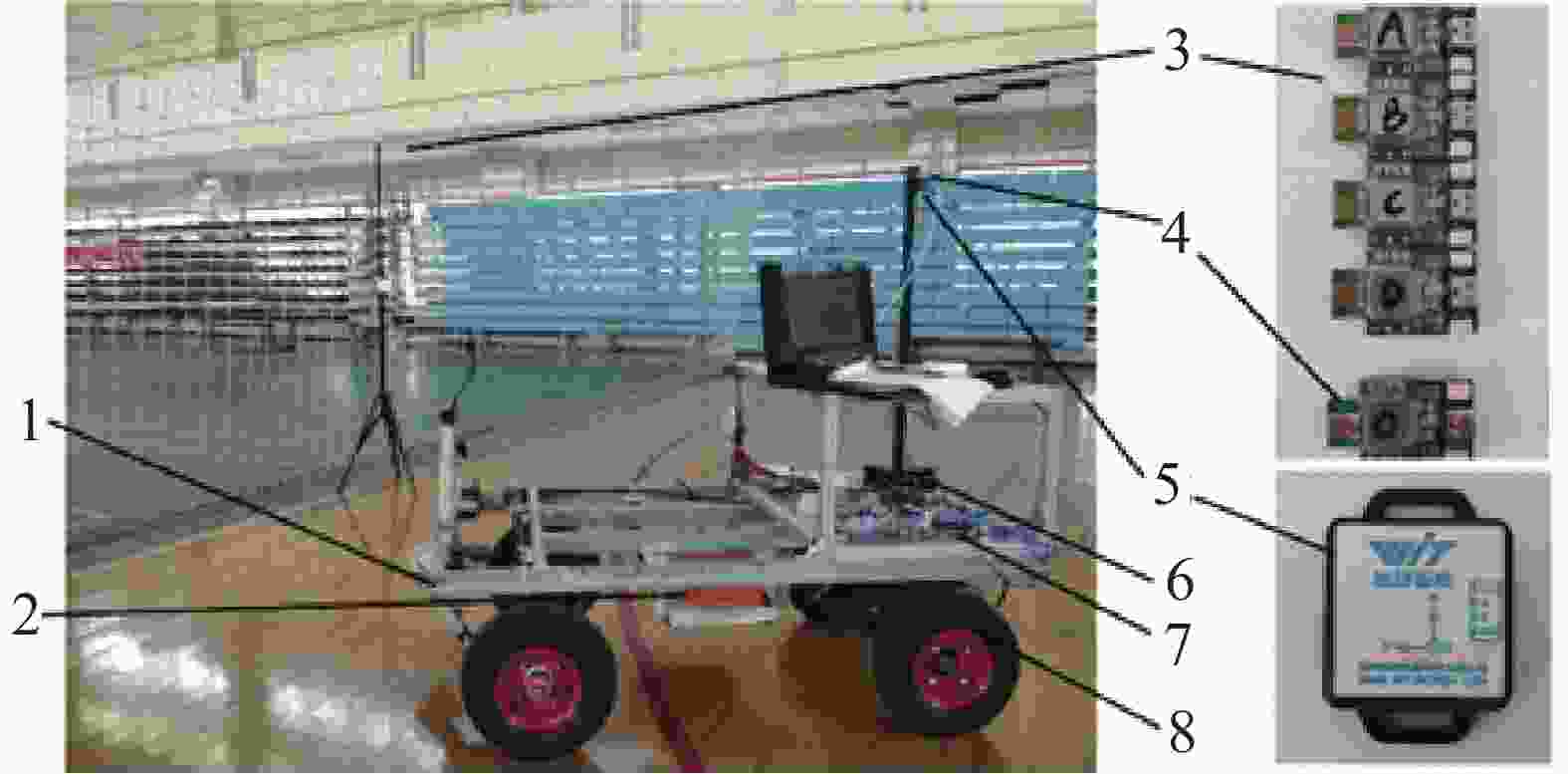
图 1 生产平台
Figure 1. Prodsuction platform
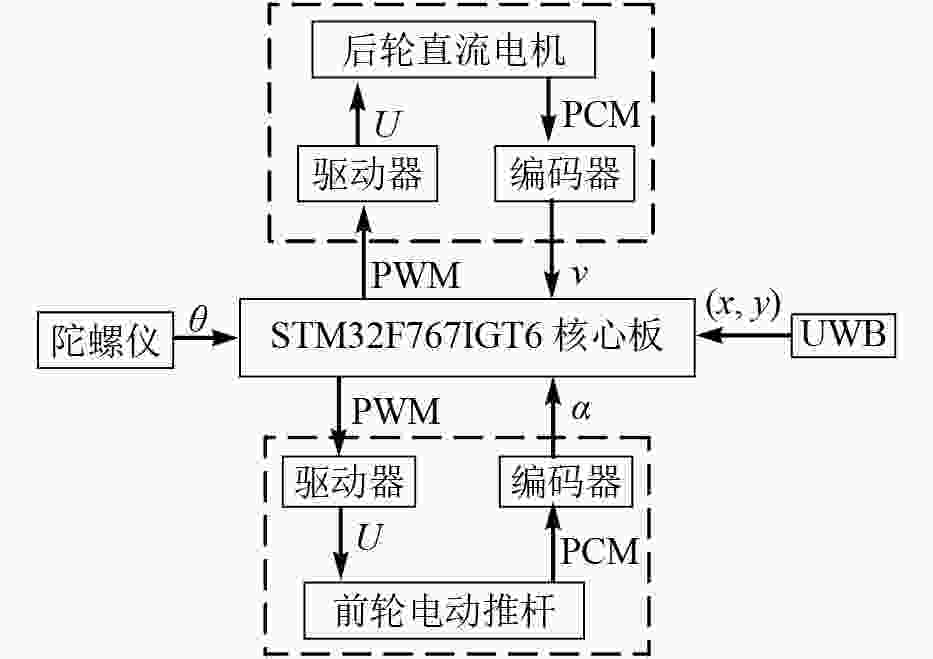
图 2 控制系统原理图
Figure 2. Block diagram of control system
-
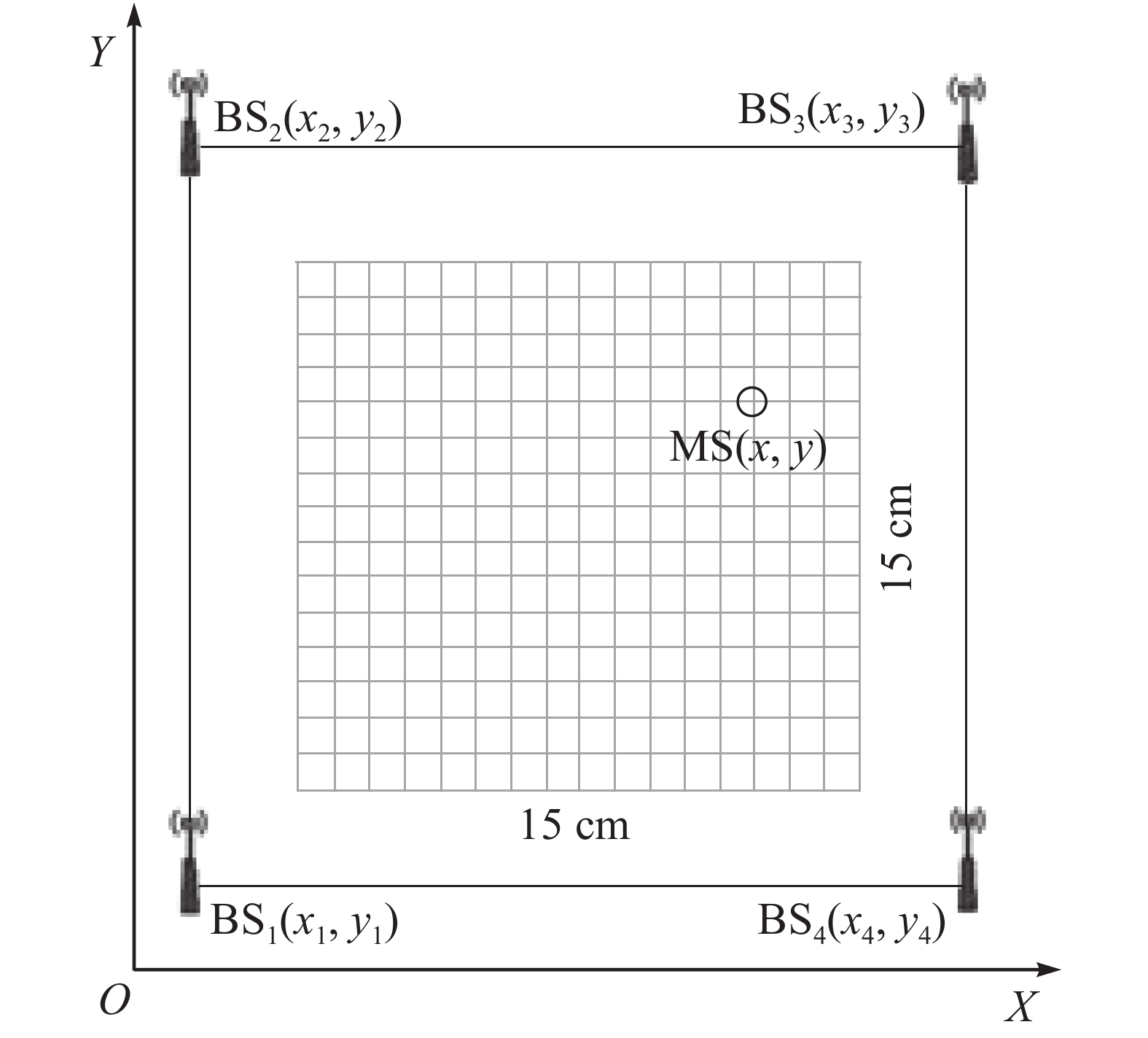
超宽带无线定位系统是由若干固定基站BS和移动标签MS通过一定的通信方式组成。根据超宽带定位原理,获取移动标签3维定位坐标至少需要4个基站。由于本研究默认生产平台行驶在水平地面上,因此定位只需用到水平面横、纵2个坐标参数。增加基站的数量可提高定位的精度。本研究采用4个基站BS1~BS4组成1个平面定位坐标系OXY,如图3所示。
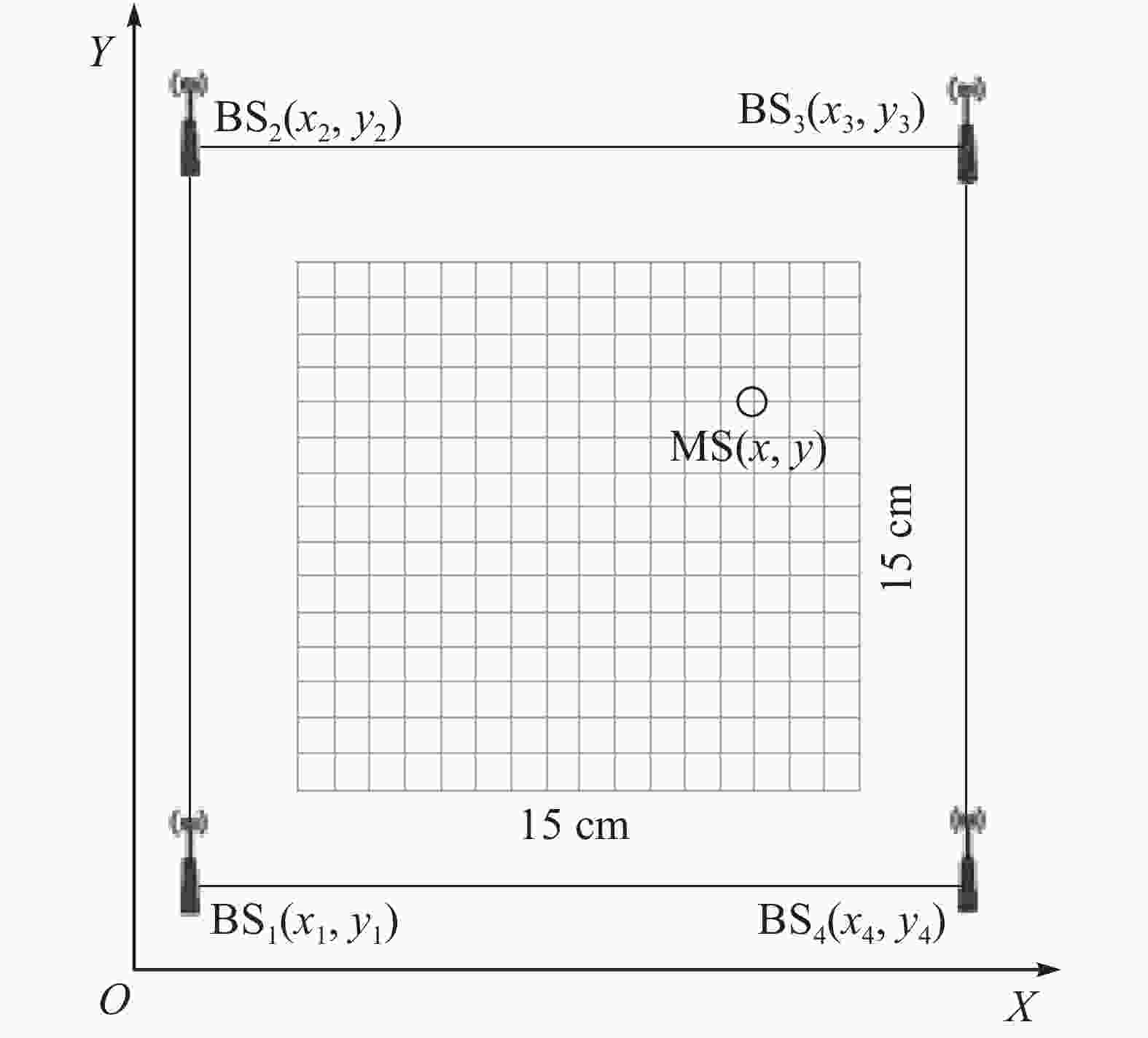
图 3 试验区域
Figure 3. Test area
-
UWB定位方法包含:信号到达时间(TOA)[17]、信号到达时间差(TDOA)[18]、信号到达角度(AOA)[19]、接收信号强度(RSSI)[20]等。AOA定位算法主要参考基站天线阵列获得信号角度,对基站位置依赖较大,且受到非视距传播影响,定位精度不高。RSSI定位算法简易,成本不高,但是用作室内定位时,易受多径传播和信号反射的影响,定位精度误差较大。TOA与TDOA较为常用,时间分辨率高;TDOA较TOA的优势在于,不需要基站与移动标签时钟同步[21],因此,本研究采用TDOA的定位方法。TDOA定位也称双曲线定位,基本思想为:任选2个坐标已知的基站为某双曲线左右焦点,2基站的距离值即为双曲线焦距值。通过测量这2个基站信号到达移动标签的时间差得到移动标签到2个基站的距离差,根据双曲线的定义可求得实半轴值,并获得该双曲线方程。用1个坐标已知的新基站替换上述2个基站中的任意1个,采用同样的方法可得到另1条双曲线方程,两者的交点即为移动标签的位置。TDOA定位算法具体步骤如下。如图3所示:在坐标系OXY中,移动标签MS的坐标为(x,y),基站BS1~BS4的坐标分别为(x1,y1)~(x4,y4)。根据TDOA测距原理可得:
$$ r_{i}=\sqrt{\left(x-x_{i}\right)^{2}+\left(y-y_{i}\right)^{2}}\text{。} $$ (1) 式(1)中:ri表示MS到BSi之间的距离,i=1, 2, 3, 4。对式(1)两边平方可得:
$$r_i^2 = {K_i} - 2{x_i}x - 2{y_i}y + {x^2} + {y^2}\text{。}$$ (2) 式(2)中:Ki=xi2+yi2。令ri,1为MS到BSi和BS1之间的距离差,可得:
$$ r_{i, 1}=c t_{i, 1}=r_{i}-r_{1}\text{。} $$ (3) 式(3)中:c表示光速(3×108 m·s−1);ti,1表示信号在MS到BSi和BS1的时间差值。联立式(1)、式(2)和式(3)可得:
$$\left[\begin{array}{ll}{x_{i, 1}} & {y_{i, 1}}\end{array}\right]\left[\begin{array}{l}{x} \\ {y}\end{array}\right]=\frac{1}{2}\left(K_{i}-K_{1}-2 r_{i, 1} r_{1}-r_{i, 1}^{2}\right)\text{。}$$ (4) 式(4)中:xi,1=xi−x1,yi,1=yi−y1。令i=2, 3,带入式(4),可得到:
$$\left[ \begin{gathered} x \\ y \\ \end{gathered} \right] = {{{P}}_1}{{{P}}_2}{r_1} + {{{P}}_1}{{{P}}_3}\text{。}$$ (5) 式(5)中:P1=
$ - {\left[ {\begin{array}{*{20}{c}} {{x_{2,1}}}&{{y_{2,1}}} \\ {{x_{3,1}}}&{{y_{3,1}}} \end{array}} \right]^{ - 1}}$ ,P2=$\left[ \begin{gathered} {r_{2,1}} \\ {r_{3,1}} \\ \end{gathered} \right]$ ,P3=$ - \dfrac{1}{2}\left[ \begin{gathered} {K_2} - {K_1} - r_{2,1}^2 \\ {K_3} - {K_1} - r_{3,1}^2 \\ \end{gathered} \right]$ 。联立式(1)和式(5),可以得到:$$ a r_{1}^{2}+b r_{1}+m=0\text{。} $$ (6) 式(6)中:a=(P1P2)TP1P2−1,b=(P1P2)T(P1P3−X1)+(P1P3−X1)T(P1P2),m=(P1P3−X1)T(P1P3−X1),X1=[x1, y1]T。由于各基站的坐标(x1,y1)~(x4,y4)都为已知,因此将这些数据代入上述所有公式即可解出a、b、m。式(6)是一个关于r1的一元二次方程,可进一步解出r1,最终解出标签的坐标(x,y)。
-
UWB信号在室内直线传播时,会受到多径干扰或障碍物遮挡而产生非视距(NLOS)误差[22],因此需掌握定位误差产生的规律,并对误差进行必要的修正。
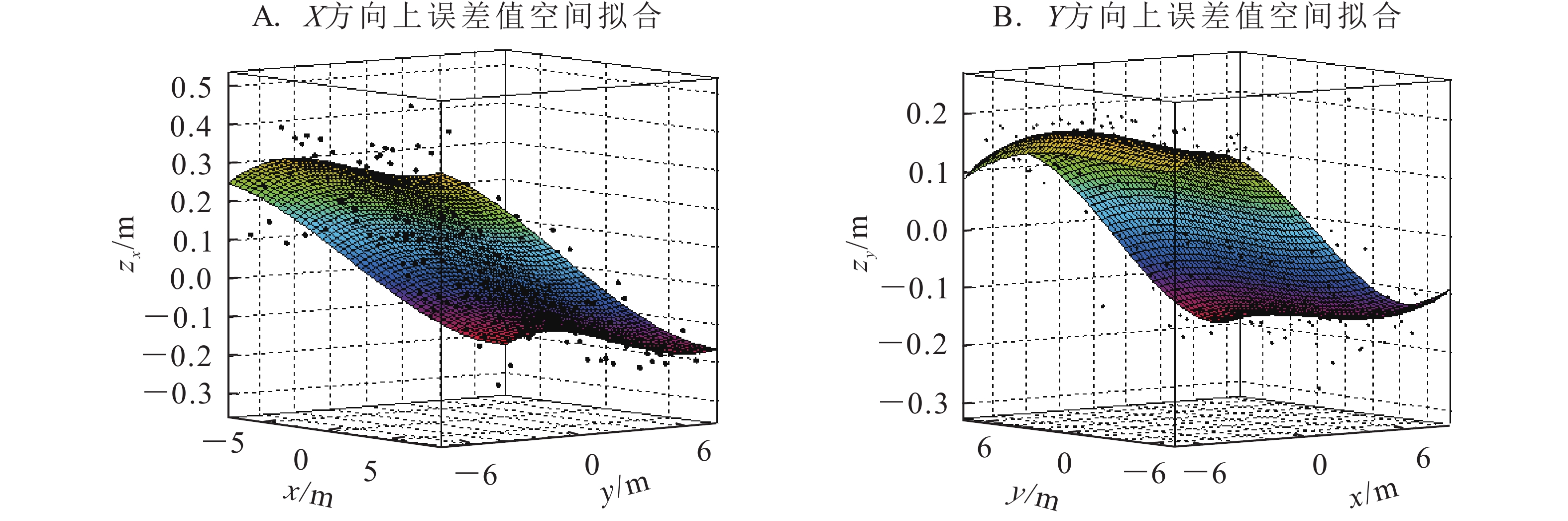
如图3所示:在UWB定位区域中心选定15 m×15 m场地,在场地中画出1 m间隔的单元格,在坐标系OXY中测量每个格点坐标值。这些测量值与格点处的精确值之间存在X和Y方向上的误差。以格点所在的平面为x-y平面,以X和Y方向上的误差值为z轴,分别构建在xyzX和xyzY空间中的误差值三维散点图,为发现误差分布的规律,用MATLAB R2012a对散点图进行二元三次多项式拟合,如图4所示。得出拟合方程如下式,各项系数如表1所示。
表 1 误差拟合方程系数
Table 1. Coefficient of error fitting equation
方程 m3 m2 m1 n3 n2 n1 p3 p2 p1 p0 zX(x, y) 0.000 31 –0.000 83 –0.038 4 –0.000 07 –0.000 22 0.001 6 –0.000 044 0.000 05 –0.000 101 0.046 7 zY(x, y) 0.000 12 –0.000 59 –0.002 7 0.000 15 0.000 42 –0.042 0 0.000 021 0.000 01 –0.000 167 0.056 4 说明:zX(x, y)为X方向的误差拟合方程,zY(x, y)为Y方向的误差拟合方程 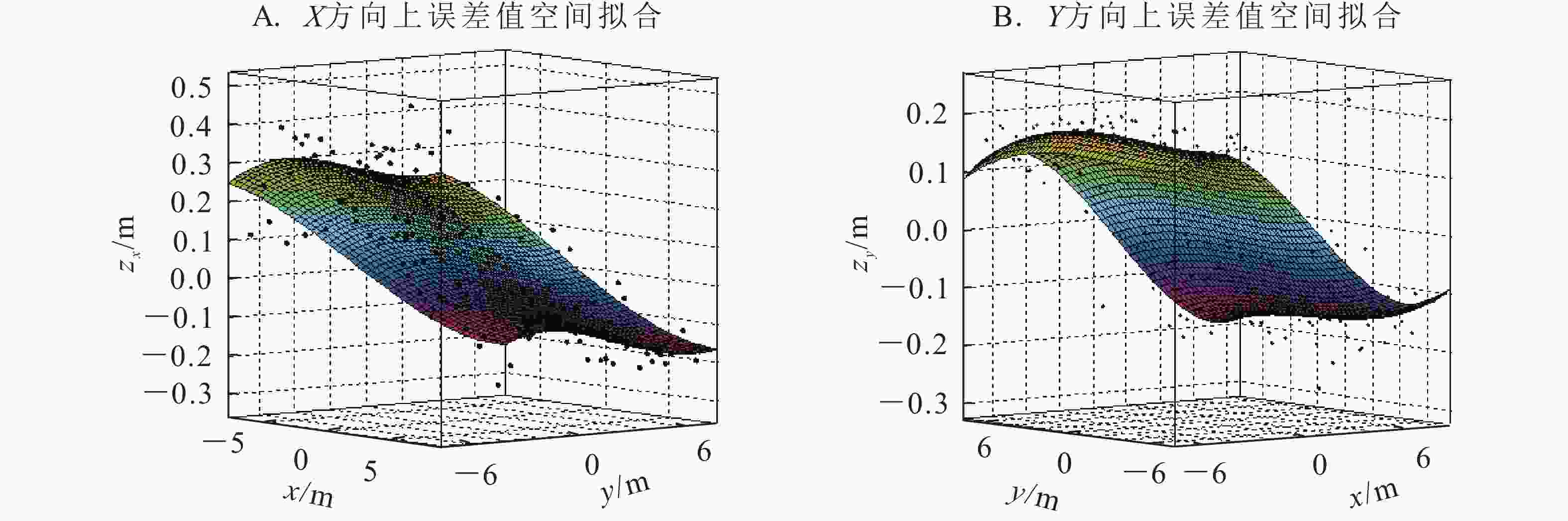
图 4 误差拟合
Figure 4. Error fitting
$$ z(x, y)= m_{3} x^{3}+m_{2} x^{2}+m_{1} x+n_{3} y^{3}+n_{2} y^{2}+ n_{1} y+p_{3} x^{2} y+p_{2} x y^{2}+p_{1} x y+p_{0}\text{。} $$ (7) 式(7)中:(x, y)为位置坐标的测量值。本研究2个拟合方程的决定系数分别为0.823和0.856,拟合效果较好。则定位修正方程为:
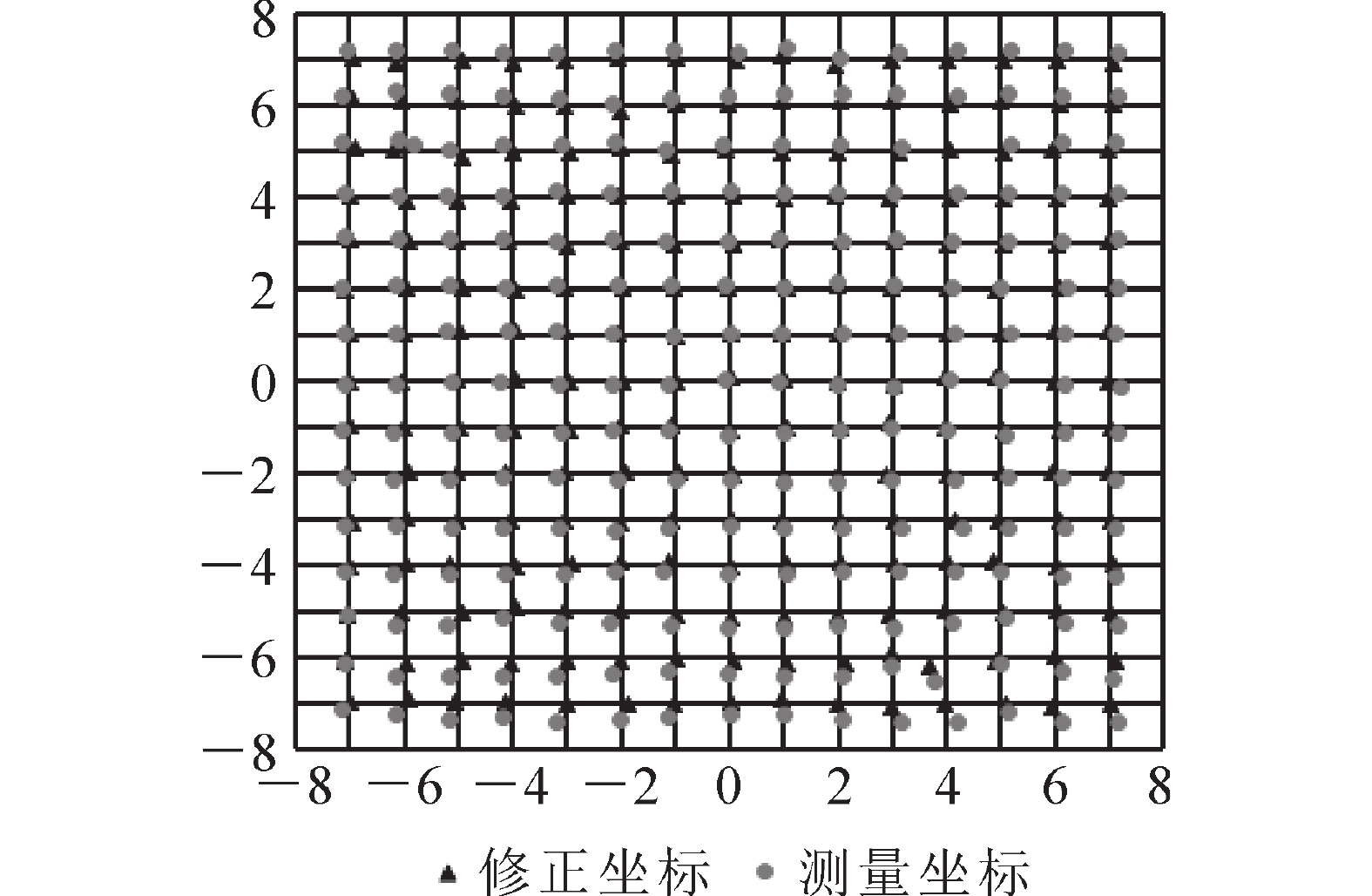
$$\left\{ \begin{gathered} {x_{{\rm{correction}}}} = x + {z_X}\left( {x,y} \right) \\ {y_{{\rm{correction}}}} = y + {z_Y}\left( {x,y} \right) \\ \end{gathered} \right.\text{。}$$ (8) 式(8)中:xcorrection和ycorrection分别表示测量点修正后的横、纵坐标。为验证误差修正方法的有效性,将测量值依次带入式(8)计算误差修正后的坐标,修正坐标与测量坐标对比如图5所示,并随机选择了20个不同的静态位置分别采集2 min,100组数据,计算平均值,分别带入定位修正公式,得到修正后坐标和修正前后的平均误差统计值。表2显示:相比修正前坐标,修正后坐标精度得到明显的提升。从表3可见:X方向平均误差减少了0.08 m,定位精度提升了66.7%,Y方向平均误差减少了0.11 m,定位精度提升了68.8%。因此,修正后的点接近实际点,验证了定位误差修正方法的有效性,满足试验需求。
表 2 修正前坐标与修正后坐标对比
Table 2. Comparison of measured coordinates and corrected coordinates
序号 实际坐标/m 修正前坐标/m 修正后坐标/m 序号 实际坐标/m 修正前坐标/m 修正后坐标/m 1 (1.50, 3.50) (1.54, 3.63) (1.53, 3.55) 11 (6.13, 1.58) (6.33, 1.67) (6.17, 1.54) 2 (1.50, –5.50) (1.51, –5.72) (1.5, –5.45) 12 (2.47, 5.39) (2.56, 5.56) (2.50, 5.41) 3 (3.50, 1.50) (3.59, 1.66) (3.51, 1.64) 13 (1.22, –3.66) (1.29, –3.84) (1.19, –3.63) 4 (3.50, –5.50) (3.58, –5.64) (3.50, –5.37) 14 (5.78, –2.32) (6.01, –2.48) (5.86, –2.33) 5 (6.50, 1.50) (6.61, 1.57) (6.46, 1.55) 15 (–4.65, 5.81) (–4.81, 6.03) (–4.66, 5.88) 6 (–3.50, 3.50) (–3.64, 3.63) (–3.49, 3.55) 16 (–0.95, 1.43) (–0.99, 1.50) (–0.91, 1.41) 7 (–3.50, –5.50) (–3.62, –5.73) (–3.47, –5.46) 17 (–2.61, –6.49) (–2.69, –6.73) (–2.56, –6.42) 8 (–4.50, –5.50) (–4.63, –5.67) (–4.47, –5.41) 18 (–5.33, –4.53) (–5.51, –4.72) (–5.34, –4.51) 9 (–5.50, –1.50) (–5.65, –1.68) (–5.47, –1.58) 19 (–5.20, –1.30) (–5.39, –1.38) (–5.24, –1.23) 10 (–5.50, 5.00) (–5.69, 5.13) (–5.53, 4.99) 20 (–1.40, 2.70) (–1.52, 2.81) (–1.42, 2.76) 表 3 修正前后平均误差统计
Table 3. Average error statistics before and after correction
方向 平均误差 定位精度提升/% 修正前/m 修正后/m X 0.12 0.04 66.7 Y 0.16 0.05 68.8 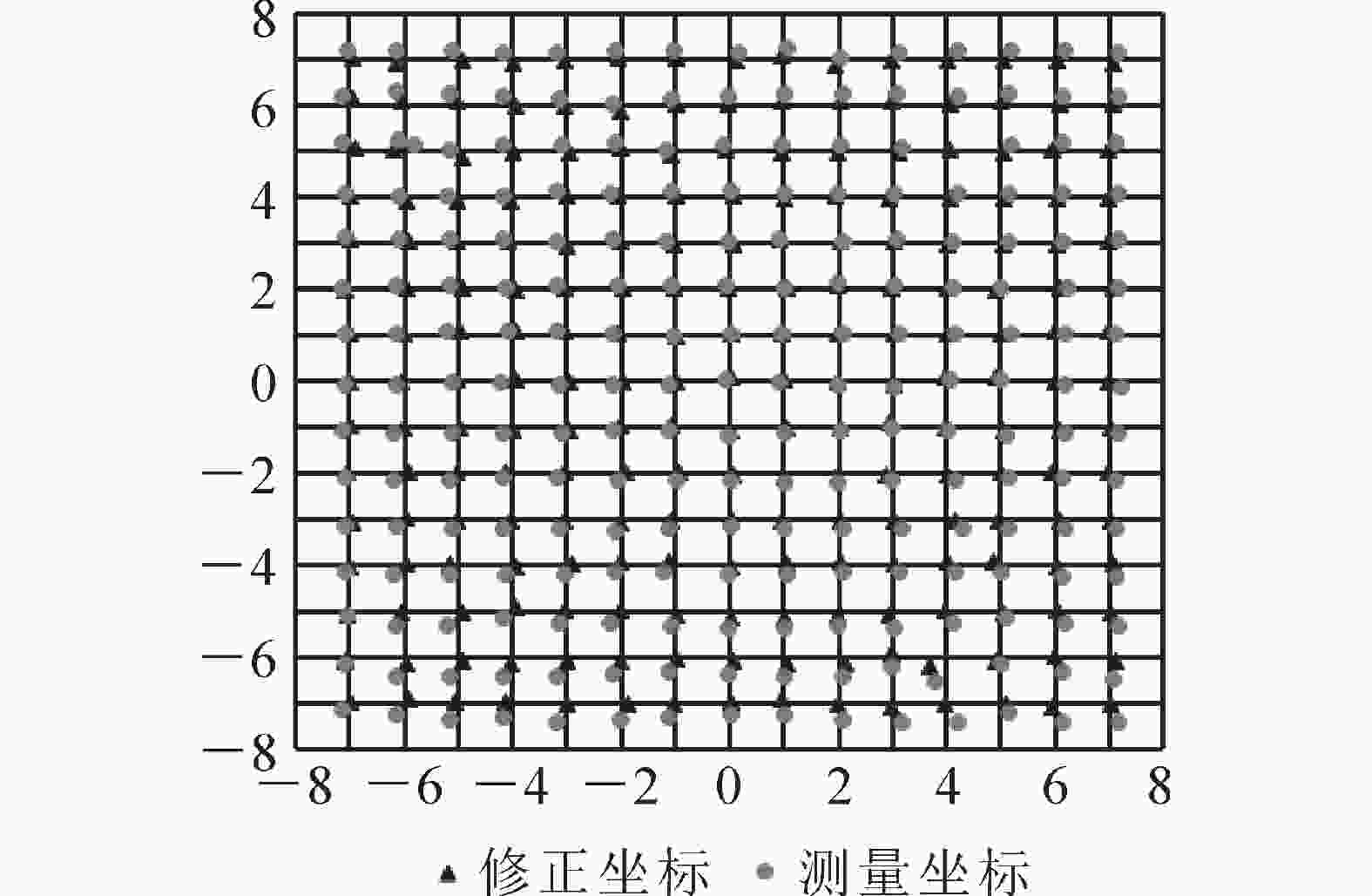
图 5 静态定位测量及修正图
Figure 5. Static positioning measurement and correction
-
本研究设计一种带解析式的模糊控制器,构建车体横向偏差、航向偏差与前轮转向角之间的映射关系,并利用自调整函数动态调整各输入变量的权重,提高生产平台在温室内狭窄空间下路径跟踪的质量。
-
本研究车体横向偏差由UWB无线定位系统采集车辆的当前绝对位置获取,航向偏差由跟踪航向和陀螺仪采集的当前车身航向计算得到。以车体横向偏差d和航向偏差θ作为模糊控制器的输入变量,以前轮转角α作为输出变量,分别对3者模糊化。d的基本论域范围为[−0.6 m,0.6 m],θ的基本论域范围为[−60°,60°],α的论域范围为[−32°,32°]。由于Mamdani型模糊推理规则满足人们思维方式的特点[23],因此,本研究采用Mamdani型模糊推理。将输入输出变量的论域变化范围都归一化为[−6,6]之间的变量,得出d的量化因子
${k_d}$ =10,θ的量化因子${k_\theta }$ =0.1,α的比例因子${k_\alpha }$ =0.17。设定d、θ和α的正负号为:生产平台位于导航线左侧时d为正,右侧为负;θ逆时针为正,顺时针为负;α左转为正,右转为负。 -
设计带有自调整函数的模糊解析表达式[24]。
$$ A=\left[ n(S-|D|)+(1-n)(S-|\Theta|)\right],\;\;\;\;\;\;\;\;(n \in[0,1])\text{。} $$ (9) 式(9)中:Α表示前轮转角的模糊变量;D表示横向偏差的模糊变量;Θ表示航向偏差的模糊变量;S表示论域设定值,此处为6;n表示自调整函数。本研究控制器权重设置原则为:生产平台在路径跟踪过程中,若横向偏差较大,则增大横向偏差权重,使其不偏离路径较远;若横向偏差较小,则对航向偏差给予较大权重,使生产平台跟踪路径更稳定。相比于常规模糊控制规则的单一,其提高了控制的灵活性,提升了精度。依据上述思想,建立自调整函数为:
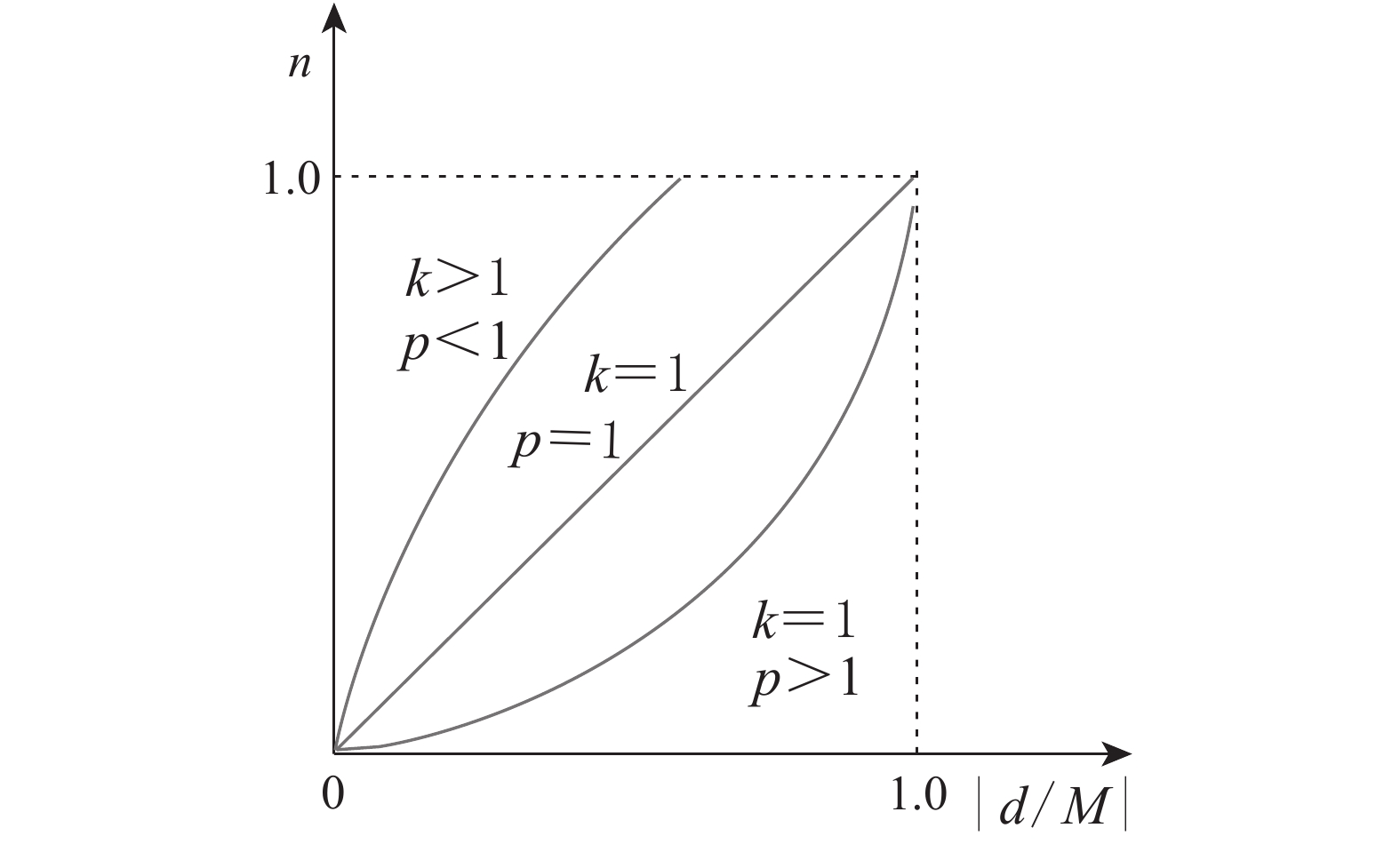
$$n = k{\left| {\frac{d}{M}} \right|^p}\text{。}$$ (10) 式(10)中:k表示系数;M表示最大误差,此处为0.6 m;p表示自调整函数的幂次;d表示横向偏差。因为式(10)的各参数均为正值,故k≤
${\left( {\dfrac{{{d_{\max }}}}{M}} \right)^{ - p}}$ 时,n≤1。自调整函数的形态根据p取值不同而改变,如图6所示。当p<1时,n随横向偏差增加较快,横向偏差在系统中占据权重多;当p>1时,航向偏差的控制作用加强,随着p的增大,其作用越强。由于生产平台在设施温室内行驶时,需频繁更改当前跟踪路径,时常会出现较大横向偏差,且道路宽度有限,因此横向偏差的权重需始终重视。经过MATLAB R2012a仿真,这里自调整函数的参数p=0.8,k=1.1。
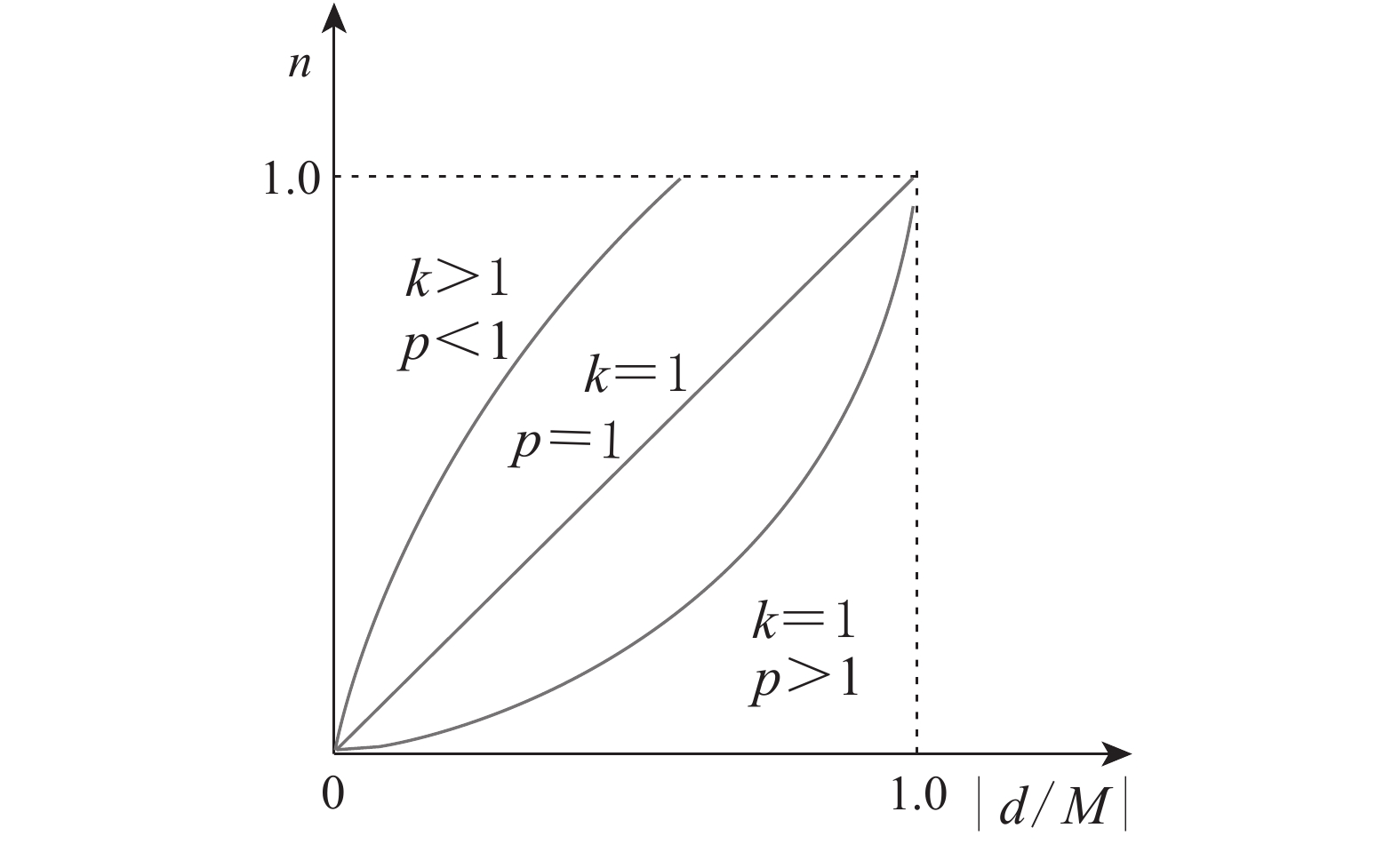
图 6 自调整函数图
Figure 6. Self-adjusting function graph
-
为了验证本研究方法的有效性,于2019年3−5月,在浙江农林大学室内体育馆布置场地(图3)进行试验。基站与移动标签距离地面的高度均为1.6 m,移动标签投影点位于生产平台后轮车轴中间。生产平台按照0.5 m·s−1的速度行驶,采样频率为5 Hz。试验类型分为直线跟踪与矩形跟踪2种。同一初始状态的试验重复4次,各数据求平均值。
本研究对偏差的平均值、极值和标准差等进行了统计分析。平均偏差是从试验开始到结束的横向偏差均值;最大偏差是在整个试验过程中横向偏差最大值;稳态偏差是当生产平台从试验开始到第1次横向偏差收敛到0 m的稳定点后横向偏差均值;稳定距离是生产平台到达稳定点行驶的距离。
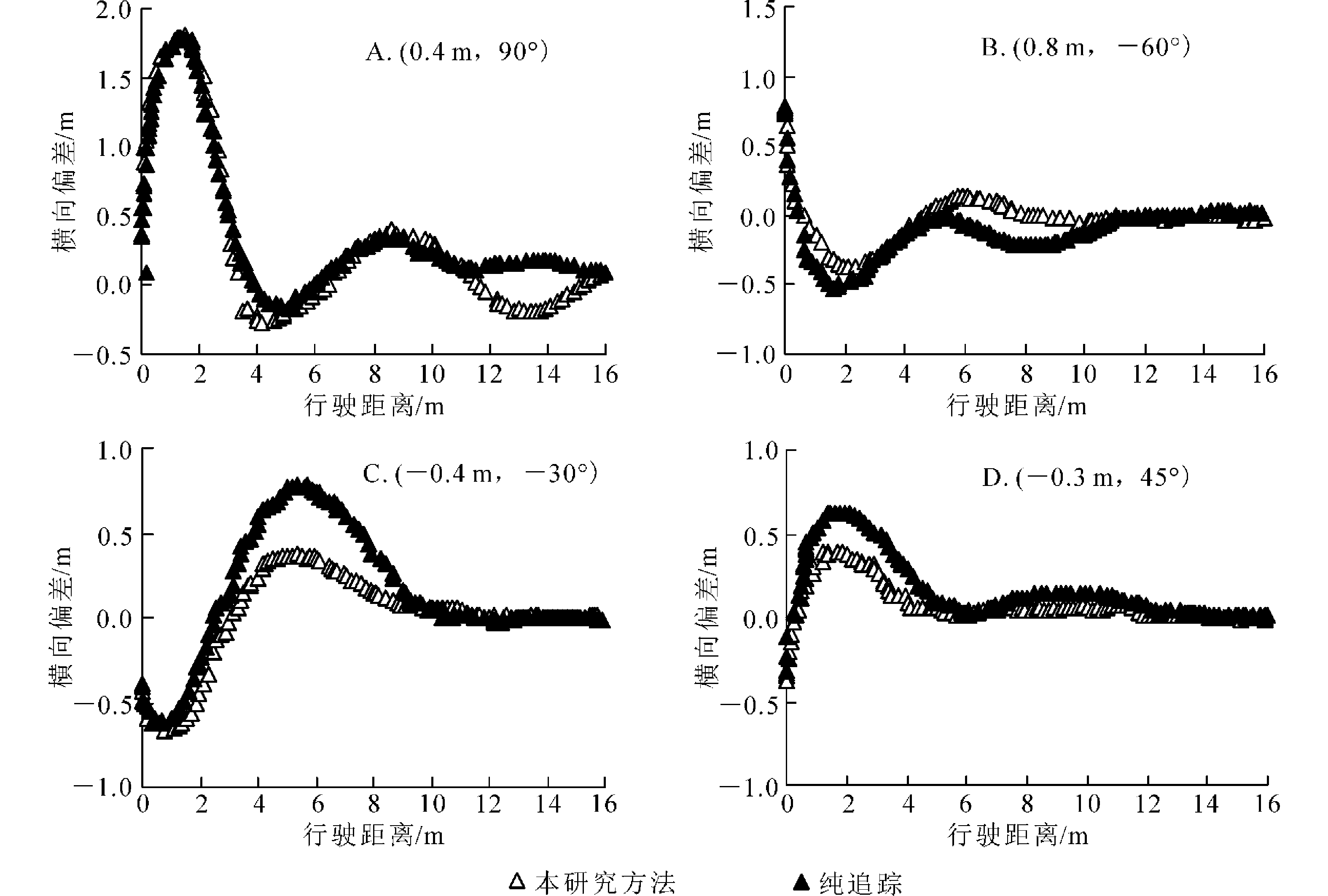
试验1:直线路径跟踪试验。设计4种偏差初始状态来考察本研究方法直线路径的性能,并通过纯追踪法进行对比验证。经多次计算机仿真,纯追踪模型取最佳前视距离为2 m。如图7所示。
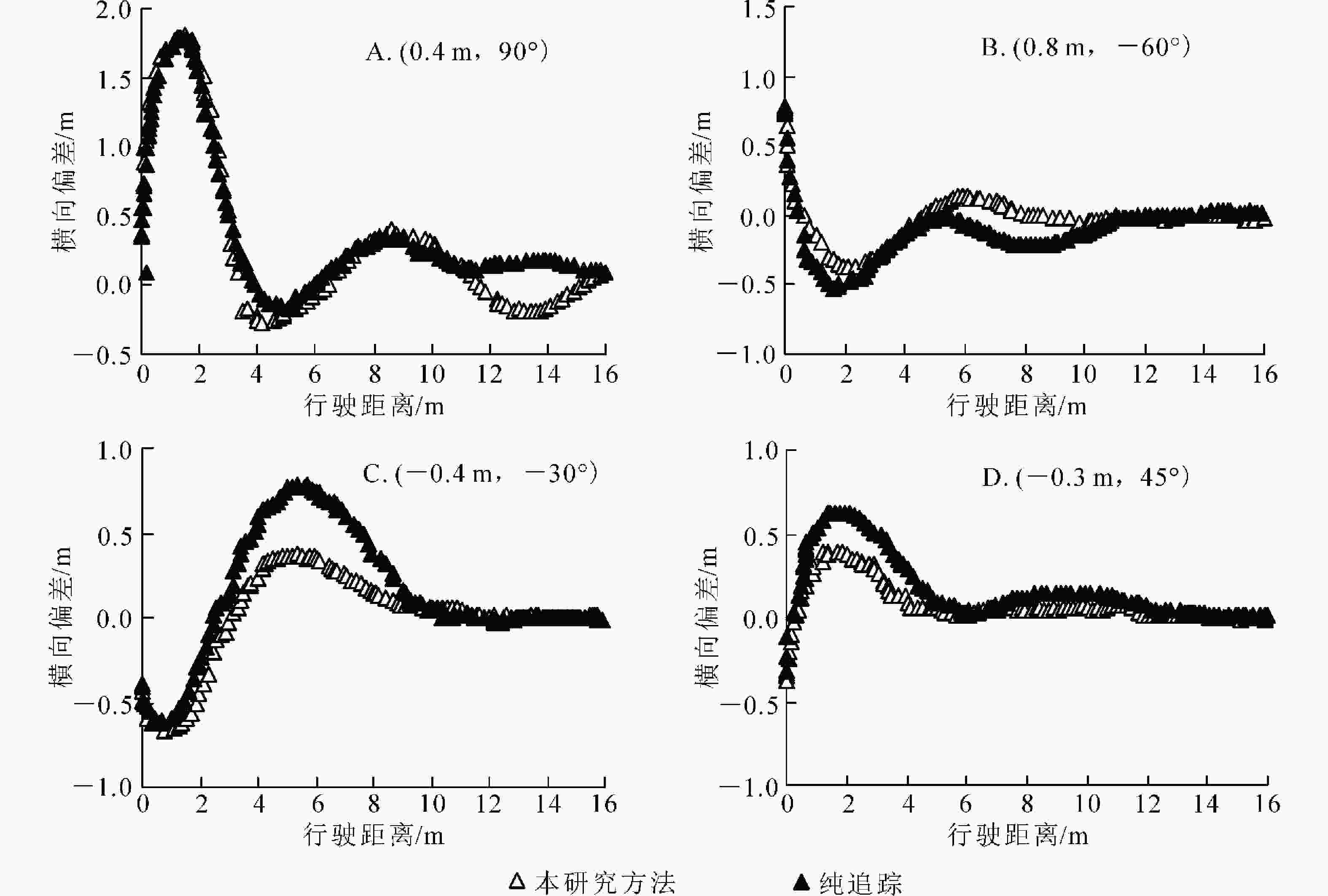
图 7 直线试验
Figure 7. Line test
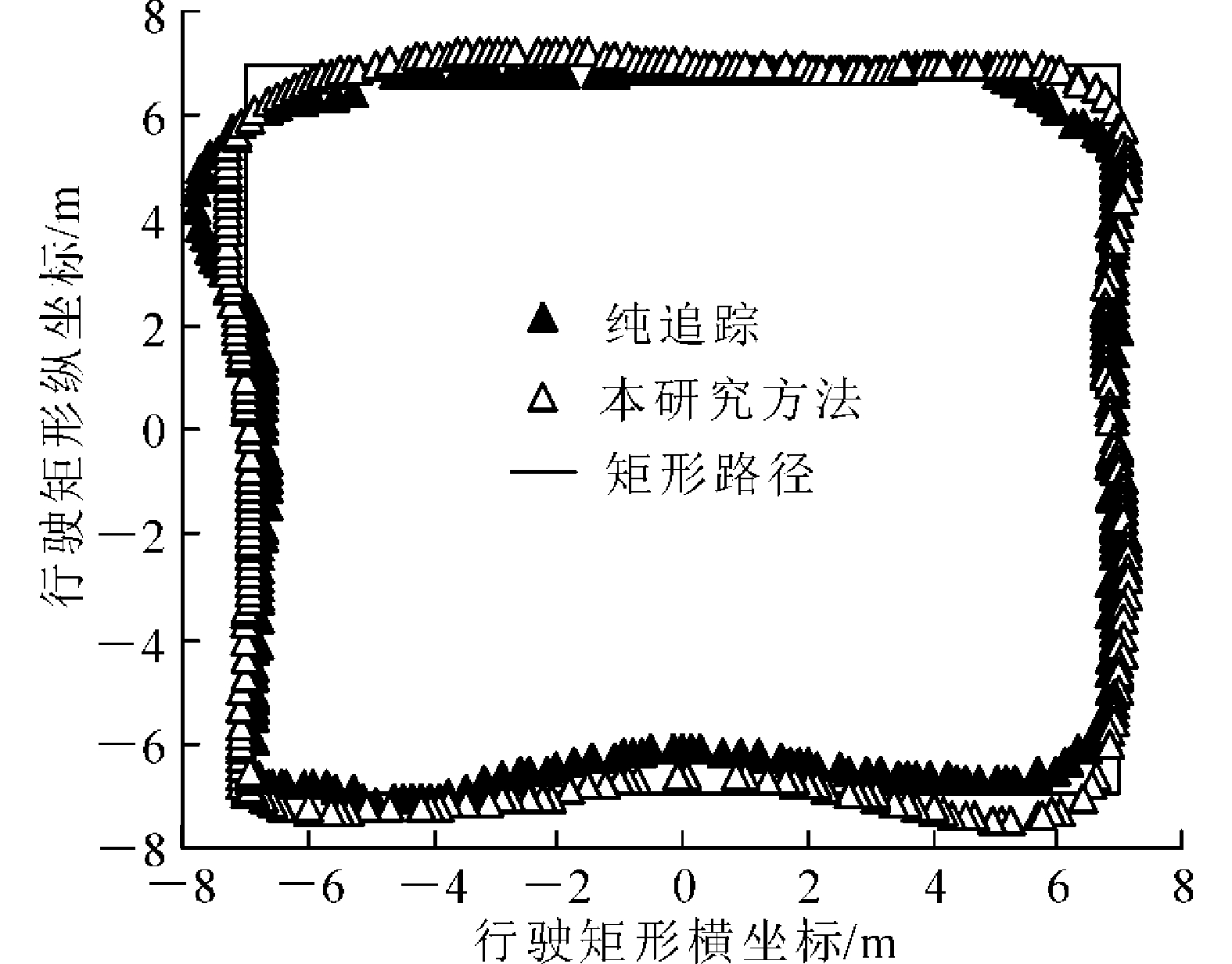
试验2:矩形路径跟踪试验。在温室作业时,农机需频繁沿着设施内道路直角转向,因此需检验生产平台矩形路径跟踪的效果。在试验场地内设计了15 m×15 m的矩形路线。如图8所示:生产平台出发的初始位置为A(−7,−7),初始横向、航向偏差均为0°,沿顺时针方向行驶。
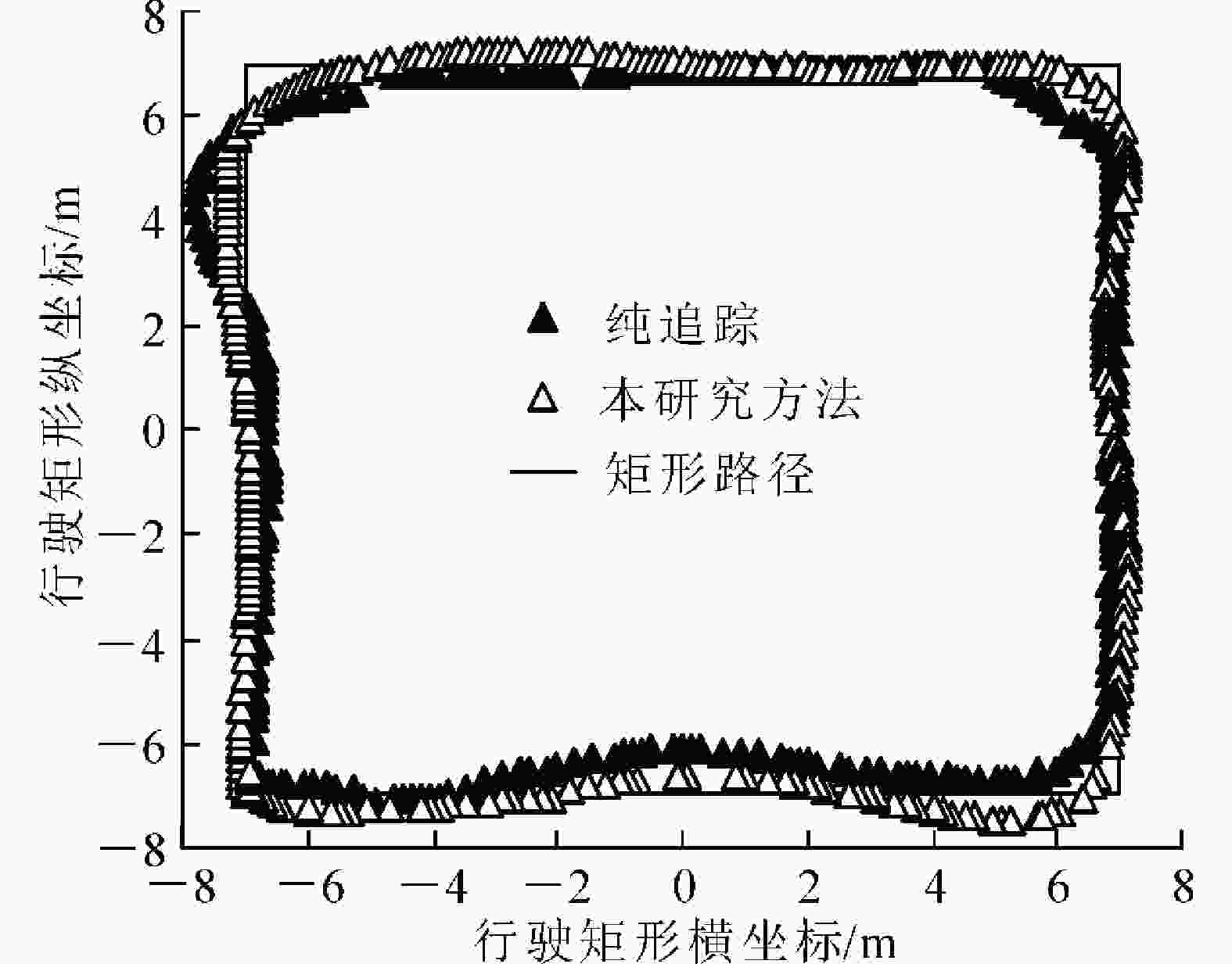
图 8 矩形试验
Figure 8. Rectangle test
-
在进行直线路径跟踪时,本研究提出的方法在4种初始状态下,生产平台平均偏差均值依次为28.7、23.8、16.9、20.1 cm,最大偏差依次为179.5、37.1、66.8、46.4 cm,在纯追踪模型中平均偏差均值依次为37.2、35.3、24.4、28.3 cm,最大偏差依次为180.8、51.3、85.6、62.2 cm。本研究方法的平均偏差比纯追踪模型分别提高了22.8%、32.6%、30.7%和28.9%,最大偏差分别提升了0.7%、27.7%、21.9%和25.4%。直线试验时第1种初始状态下偏差明显大于其他状态,是由于初始位置偏离路径较大,需要进行大幅度转向才能逐渐收敛至跟踪直线。表明相同的环境下,本研究方法具有更好的路径跟踪精度。
采用本研究方法进行直线路径跟踪时,平均偏差值的标准差为5.8 cm;而采用纯追踪模型法的平均偏差值的标准差为9.7 cm。标准差越小,说明数据离散程度越低,前者的标准差比后者小,因此本研究方法具有更好的跟踪稳定性。
在进行直线路径跟踪时,本研究方法4种初始状态下的稳定距离分别为319.9、35.4、310.1和16.8 cm;在纯追踪模型中,稳定距离则为432.1、50.3、250.1和22.4 cm,稳定距离提升率分别为25.9%、29.6%、19.3%和25.0%。这是因为本研究方法在进行转向角计算时,增加航向偏差的权重动态调整转向角,使得车体向期望路径的收敛速度较快。表明相同的试验环境下,本研究方法具有更好的收敛快速性。
在矩形路径跟踪时,生产平台在本研究方法下的平均偏差为14.4 cm,在纯追踪模型中,平均偏差为36.9 cm,平均偏差提升率达60.9%,能基本满足作业需求。在2种方法的矩形试验中,最大偏差都发生在更换路径时,即矩形路径的转角处。这是由于在更换路径时需要做类似于大偏差初始状态的直线跟踪,需要大幅度转向,因此产生大偏差。
-
采用UWB模块构建无线定位系统获取生产平台的位置信息,并设计了15 m×15 m的矩形试验区域。在试验区域内随机测量一些点,这些点在原X、Y方向定位平均误差分别为0.12和0.16 m,经误差修正后X、Y方向定位平均误差分别为0.04和0.05 m。使用带自调整函数的解析式模糊控制器,动态调整横向偏差与航向偏差的权重,对前轮转角的输出实现自适应调整,其中自调整函数的参数p=0.8,k=1.1。在生产平台上进行了直线和矩形的路径跟踪,生产平台使用本研究方法的直线跟踪平均稳态偏差在4.7~6.4 cm,矩形路径的平均偏差为14.4 cm,能满足温室内狭窄道路的运输需求。下一步考虑改良生产平台的机械性能,测试在不同的环境下UWB的定位精度,以及在不同的路况下生产平台路径跟踪的平顺性。
Automatic navigation of production platform in greenhouse based on wireless positioning
-
摘要:
目的 为了提高温室内车辆自动导航的精度,提出了一种基于超宽带定位和带有自调整函数模糊控制的路径跟踪方法。 方法 首先利用超宽带(UWB)模块构建无线定位系统,采用二元三次多项式对定位误差进行拟合,并修正测量点误差;其次结合带自调整函数解析式的模糊控制器,对横向偏差与航向偏差的权重进行动态调整,输出前轮转角;最后分别进行直线和矩形路径跟踪的实车试验,并与使用纯追踪方法的结果进行对比。 结果 在进行不同初始状态的直线路径跟踪时,平均偏差均值为22.4 cm,标准差为5.8 cm,稳态偏差平均值为5.4 cm,比纯追踪模型精度分别提升了28.4%、40.2%和34.9%;进行矩形路径跟踪时,平均偏差为14.4 cm,最大偏差为46.9 cm,相比于纯追踪模型精度分别提升了46.5%和53.5%,其中最大偏差主要出现在矩形的转角处。 结论 本研究提出的方法具有较好的稳定性和控制精度,能满足生产平台在温室内自动导航作业需求。图8表3参24 Abstract:Objective The current paper is aimed to put forward a path tracking method based on ultra wideband (UWB) positioning and fuzzy control with self-adjustment function in order to improve the accuracy of automatic vehicle navigation in greenhouse. Method Firstly, the UWB module was used to construct the wireless positioning system, with which the positioning error of the experimental data was fitted employing bivariate cubic polynomial while measurement point errors were corrected by means of data fitting. Secondly, the weight of lateral deviation and heading deviation was dynamically adjusted with a self-adjusting analytic fuzzy controller so as to obtain the front wheel angle. Finally, real vehicle tests of linear and rectangular path tracking were carried out with the results compared with those obtained employing pure tracking method. Result When the line path tracking with different initial stages is conducted, there was an average deviation of 22.4 cm, a standard deviation of 5.8 cm and a mean steady-state deviation of 5.4 cm. And the accuracy of this model has been improved by 28.4%, 40.2% and 34.9% respectively compared with that of pure tracking model. As for rectangular path tracking, the average deviation of the current method is 14.4 cm and the maximum deviation is 46.9 cm, with the maximum deviation mainly occurring at the corner of the rectangle. Similarly, the accuracy of this model is improved by 46.5% and 53.5% respectively, compared with that of the pure tracking model. Conclusion The method presented in this paper demonstrates favorable stability and control precision, and it could meet the needs of the automatic navigation operation of the production platform in the greenhouse. [Ch, 8 fig. 3 tab. 24 ref.] -
Key words:
- agricultural machinery /
- ultra wideband(UWB) /
- self-adjusting function /
- fuzzy control /
- greenhouse /
- path tracking
-
图 1 生产平台
1. 前轮推杆;2. 电源;3. 基站;4.移动标签;5. 电子陀螺仪;6. 后轮电机驱动器;7. 控制器;8. 直流电机
Figure 1 Prodsuction platform
图 2 控制系统原理图
(x, y)为移动标签坐标;θ为航向偏差;α为前轮转角;v为速度;U为电压;PWM为脉冲宽度调制;PCM为脉冲编码调制
Figure 2 Block diagram of control system
表 1 误差拟合方程系数
Table 1. Coefficient of error fitting equation
方程 m3 m2 m1 n3 n2 n1 p3 p2 p1 p0 zX(x, y) 0.000 31 –0.000 83 –0.038 4 –0.000 07 –0.000 22 0.001 6 –0.000 044 0.000 05 –0.000 101 0.046 7 zY(x, y) 0.000 12 –0.000 59 –0.002 7 0.000 15 0.000 42 –0.042 0 0.000 021 0.000 01 –0.000 167 0.056 4 说明:zX(x, y)为X方向的误差拟合方程,zY(x, y)为Y方向的误差拟合方程  下载: 导出CSV
下载: 导出CSV
表 2 修正前坐标与修正后坐标对比
Table 2. Comparison of measured coordinates and corrected coordinates
序号 实际坐标/m 修正前坐标/m 修正后坐标/m 序号 实际坐标/m 修正前坐标/m 修正后坐标/m 1 (1.50, 3.50) (1.54, 3.63) (1.53, 3.55) 11 (6.13, 1.58) (6.33, 1.67) (6.17, 1.54) 2 (1.50, –5.50) (1.51, –5.72) (1.5, –5.45) 12 (2.47, 5.39) (2.56, 5.56) (2.50, 5.41) 3 (3.50, 1.50) (3.59, 1.66) (3.51, 1.64) 13 (1.22, –3.66) (1.29, –3.84) (1.19, –3.63) 4 (3.50, –5.50) (3.58, –5.64) (3.50, –5.37) 14 (5.78, –2.32) (6.01, –2.48) (5.86, –2.33) 5 (6.50, 1.50) (6.61, 1.57) (6.46, 1.55) 15 (–4.65, 5.81) (–4.81, 6.03) (–4.66, 5.88) 6 (–3.50, 3.50) (–3.64, 3.63) (–3.49, 3.55) 16 (–0.95, 1.43) (–0.99, 1.50) (–0.91, 1.41) 7 (–3.50, –5.50) (–3.62, –5.73) (–3.47, –5.46) 17 (–2.61, –6.49) (–2.69, –6.73) (–2.56, –6.42) 8 (–4.50, –5.50) (–4.63, –5.67) (–4.47, –5.41) 18 (–5.33, –4.53) (–5.51, –4.72) (–5.34, –4.51) 9 (–5.50, –1.50) (–5.65, –1.68) (–5.47, –1.58) 19 (–5.20, –1.30) (–5.39, –1.38) (–5.24, –1.23) 10 (–5.50, 5.00) (–5.69, 5.13) (–5.53, 4.99) 20 (–1.40, 2.70) (–1.52, 2.81) (–1.42, 2.76)
下载: 导出CSV
表 3 修正前后平均误差统计
Table 3. Average error statistics before and after correction
方向 平均误差 定位精度提升/% 修正前/m 修正后/m X 0.12 0.04 66.7 Y 0.16 0.05 68.8
下载: 导出CSV
-
[1] 齐飞,魏晓明,张跃峰. 中国设施园艺装备技术发展现状与未来研究方向[J]. 农业工程学报, 2017, 33(24): 1 − 9. QI Fei, WEI Xiaoming, ZHANG Yuefeng. Development status and future research emphase on greenhouse horticultural equipment and its relative technology in China [J]. Trans Chin Soc Agric Eng, 2017, 33(24): 1 − 9. [2] 胡静涛,高雷,白晓平,等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10): 1 − 10. HU Jingtao, GAO Lei, BAI Xiaoping, et al. Review of research on automatic guidance of agricultural vehicles [J]. Trans Chin Soc Agric Eng, 2015, 31(10): 1 − 10. [3] NAGASAKA Y, SAITO H, TAMAKI K, et al. An autonomous rice transplanter guided by global positioning system and inertial measurement unit [J]. J Field Rob, 2010, 26(6/7): 537 − 548. [4] KARNIK J, STREIT J. Summary of available indoor location techniques [J]. IFAC-Papers Online, 2016, 49(25): 311 − 317. [5] 李天华,吴增昊,廉宪坤,等. 基于定向摄像头的大拱棚运输车视觉导航研究[J]. 农业机械学报, 2018, 49(增刊 1): 15 − 20. LI Tianhua, WU Zenghao, LIAN Xiankun, et al. Navigation line detection for greenhouse carrier vehicle based on fixed direction camera [J]. Trans Chin Soc Agric Mach, 2018, 49(suppl 1): 15 − 20. [6] 张丽,李名莉. 温室机器人道路识别与路径导航研究——基于红外测距[J]. 农机化研究, 2017, 39(4): 221 − 225. ZHANG Li, LI Mingli. Greenhouse robot path recognition and path navigation: based on infrared distance measurement [J]. J Agric Mech Res, 2017, 39(4): 221 − 225. [7] 杨世胜,张宾,于曙风,等. 电磁诱导农用喷雾机器人路径导航系统的设计与实现[J]. 机器人, 2007, 29(1): 78 − 81. YANG Shisheng, ZHANG Bin, YU Shufeng, et al. Design and implementation of the navigation system for an electromagnetic guided agricultural spraying robot [J]. Robot, 2007, 29(1): 78 − 81. [8] 王殿君,兰云峰,任福君,等. 基于有源RFID的室内移动机器人定位系统[J]. 清华大学学报(自然科学版), 2010, 50(5): 673 − 676. WANG Dianjun, LAN Yunfeng, REN Fujun, et al. Indoor mobile-robot localization system based on active RFID [J]. J Tsinghua Univ Sci Technol, 2010, 50(5): 673 − 676. [9] 陈君兰, 周孟然, 赵苍荣, 等. 基于ZigBee无线传感网络的矿井机车定位系统的研究[J]. 煤炭技术, 2010, 29(3): 176 − 179. CHEN Junlan, ZHOU Mengran, ZHAO Cangrong, et al. Mine-cars locating system of underground coalmine based on zigbee wireless sensor network [J]. Coal Technol, 2010, 29(3): 176 − 179. [10] 林相泽, 王祥, 林彩鑫, 等. 基于超宽带的温室农用车辆定位信息采集与优化[J]. 农业机械学报, 2018, 49(10): 23 − 29, 45. LIN Xiangze, WANG Xiang, LIN Caixin, et al. Location information collection and optimization for agricultural vehicle based on UWB [J]. Trans Chin Soc Agric Mach, 2018, 49(10): 23 − 29, 45. [11] 孙小文,张小超,赵博,等. 农资仓储脉冲超宽带室内定位系统设计与试验及误差分析[J]. 农业工程学报, 2017, 33(增刊): 23 − 29. SUN Xiaowen, ZHANG Xiaochao, ZHAO Bo, et al. Design, experiment and error analysis of impulse radio-ultra wide band indoor positioning system used in agricultural warehousing [J]. Trans Chin Soc Agric Eng, 2017, 33(suppl): 23 − 29. [12] RAINS G C, FAIRCLOTH A G, THAI C, et al. Evaluation of a simple pure pursuit path-following algorithm for an autonomous, articulated-steer vehicle [J]. Appl Eng Agric, 2014, 30(3): 367 − 374. [13] 石翔,马蓉,张长龙,等. 基于模糊控制的拖拉机路径跟踪仿真研究[J]. 农机化研究, 2016, 38(8): 237 − 241. SHI Xiang, MA Rong, ZHANG Changlong, et al. Simulation study on tractors path tracking baesd on fuzzy control [J]. J Agric Mech Res, 2016, 38(8): 237 − 241. [14] 熊中刚,叶振环,贺娟,等. 基于免疫模糊 PID 的小型农业机械路径智能跟踪控制[J]. 机器人, 2015, 37(2): 212 − 223. XIONG Zhonggang, YE Zhenhuan, HE Juan, et al. Small agricultural machinery path intelligent tracking control based on fuzzy immune PID [J]. Robot, 2015, 37(2): 212 − 223. [15] XUE J L, ZHANG L, GRIFT T E. Variable field-of-view machine vision based row guidance of an agricultural robot [J]. Comput Electron Agric, 2012, 84: 85 − 91. [16] ABIYEV R H, GÜNSEL I S, AKKAYA N, et al. Fuzzy control of omnidirectional robot [J]. Proced Comput Sci, 2017, 120: 608 − 616. [17] 姚立健,SANTOSH K P,杨自栋,等. 基于超宽带无线定位的农业设施内移动平台路径跟踪研究[J]. 农业工程学报, 2019, 35(2): 17 − 24. YAO Lijian, SANTOSH K P, YANG Zidong, et al. Path tracking of mobile platform in agricultural facilities based on ultra wideband wireless positioning [J]. Trans Chin Soc Agric Eng, 2019, 35(2): 17 − 24. [18] HO K C. Source localization using TDOA with erroneous receiver positions[C]//KOVAVISARUCH L, PARIKH, H. 2004 IEEE International Symposium on Circuits and Systems (ISCAS). Vancouver, BC, Canada: IEEE, 2004: 453 − 456. [19] 王俊,刘刚. 基于遗传BP算法的温室无线传感器网络定位方法[J]. 农业工程学报, 2012, 28(21): 156 − 163. WANG Jun, LIU Gang. Localization method of wireless sensor network for greenhouse based on genetic BP algorithm [J]. Trans Chin Soc Agric Eng, 2012, 28(21): 156 − 163. [20] 郑学理,付敬奇. 基于PDR和RSSI的室内定位算法研究[J]. 仪器仪表学报, 2015, 36(5): 1177 − 1185. ZHENG Xueli, FU Jingqi. Study on PDR and RSSI based indoor localization algorithm [J]. Chin J Sci Instrum, 2015, 36(5): 1177 − 1185. [21] 曾玲,彭程,刘恒. 基于信号到达时间差的超宽带室内定位算法[J]. 计算机应用, 2018, 38(增刊 1): 135 − 139. ZENG Ling, PENG Cheng, LIU Heng. UWB indoor positioning algorithm based on time difference of arrival [J]. J Comput Appl, 2018, 38(suppl 1): 135 − 139. [22] XU J, MA M, LAW C L. Performance of time-difference-of-arrival ultra wideband indoor localisation [J]. IET Sci Meas Technol, 2011, 5(2): 46 − 53. [23] 王万良,石浩,李燕君. 基于Mamdani型模糊推理的加权质心定位算法[J]. 计算机科学, 2015, 42(10): 101 − 105. WANG Wanliang, SHI Hao, LI Yanjun. Weighted centroid localization algorithm based on Mamdani fuzzy theory [J]. Comput Sci, 2015, 42(10): 101 − 105. [24] 李逃昌,胡静涛,高雷,等. 基于模糊自适应纯追踪模型的农业机械路径跟踪方法[J]. 农业机械学报, 2013, 44(1): 205 − 210. LI Taochang, HU Jingtao, GAO Lei, et al. Agricultural machine path tracking method based on fuzzy adaptive pure pursuit model [J]. Trans Chin Soc Agric Mach, 2013, 44(1): 205 − 210. -

-
链接本文:
https://zlxb.zafu.edu.cn/article/doi/10.11833/j.issn.2095-0756.20190364
 点击查看大图
点击查看大图
计量
- 文章访问数: 3325
- HTML全文浏览量: 1147
- PDF下载量: 46
- 被引次数: 0

















