




-
胸径和树高是各类森林资源调查的重要测树因子,是获取林分蓄积量、生物量、碳储量等信息的基础变量[1]。在传统地面调查中,胸径可以利用测径围尺量测,树高则需借助测高器、激光枪等设备测量。因林分内树冠遮挡视线难以快速测量,一般按径阶绘制树高曲线,以胸径实测值查找相对应的树高值[2],需要耗费大量财力物力,效率低下。
激光雷达(light detection and ranging,LiDAR)扫描技术以激光脉冲的形式获取单木位置、树高和胸径等三维信息的优势,在森林资源调查领域得到快速发展[3−4]。背负式LiDAR (backpack laser scanning,BLS)作为激光雷达产品的典型代表之一,与地基式LiDAR (terrestrial laser scanning, TLS)相比更便携,更高效。背负式LiDAR能够结合同步定位与地图构建(simultaneous localization and mapping,SLAM)算法,采集不同尺度、不同地形的林下高精度三维点云信息[5−7]。李丹等[8]基于地基式LiDAR数据,提取了红松Pinus koraiensis的胸径和树高,发现胸径估测效果较好,决定系数(R2)为0.91,树高估测效果较差,R2为0.48。黄旭等[9]基于背负式LiDAR提取了落叶松Larix olgensis的胸径和树高,提取精度分别为94.51%、80.27%,显示背负式LiDAR胸径提取优势显著高于树高。无人机机载LiDAR (unmanned aerial vehicle laser scanning,ULS)具有获取树冠上层三维信息的显著优势[10]。基于冠层高度模型(canopy height model,CHM)的图像分割和基于归一化点云空间聚类的点云分割是无人机机载LiDAR单木分割的典型方法[11−12]。陈思宇等[13]比较了基于点云空间特征和基于冠层高度模型的单木分割方法,发现利用点云空间特征能够避免冠层高度模型插值产生的栅格误差,点云聚类算法进行单木分割时存在距离阈值类似的情况,从而影响提取结果。朱泊东[14]利用无人机机载LiDAR获取冠层高度模型和归一化点云,采用CHM分水岭分割法、基于点云局部最大值聚类算法和基于层堆叠种子点的点云分割法进行单木分割,表明在低郁闭林分中CHM分水岭分割算法单木提取效果较好,而在高郁闭林分,基于层堆叠种子点的点云分割效果较好。POLEWSKI等[15]利用相似度函数特征点匹配,实现对无人机机载LiDAR和背负式LiDAR点云的精配准。张信杰等[16]融合背负式LiDAR和无人机机载LiDAR数据,提取树高信息,发现得益于无人机机载LiDAR获取冠上加密点云的优势,融合点云的树高提取精度明显优于背负式LiDAR点云。背负式LiDAR由下而上获取点云,无人机机载LiDAR由上而下获取点云,两者互补能够获取高精度树高和胸径结果。
本研究以云南松Pinus yunnanensis天然纯林为对象,获取背负式LiDAR和无人机机载LiDAR扫描数据,通过LiDAR360 MLS和LiDAR360软件进行单木分割,从背负式LiDAR点云中提取胸径和树高,同时,通过融合背负式LiDAR和无人机机载LiDAR数据获取能够表征林分三维结构的点云,实现高精度地提取树高和胸径。以期建立一种精准、高效的胸径和树高信息估算方法,旨在为今后各类森林资源调查提供可信度高、成本低、效率高的技术手段。
-
研究区位于云南省昆明市富民县罗免乡黄草坝(25°21′35.3″~25°24′8.3″N,102°27′36.5″~102°30′50.9″E)。该区属亚热带季风气候,年平均气温为16.3 ℃,年平均降水量为854.0 mm。森林资源丰富,全县森林覆盖率为62.97%。研究区为云南松天然林封山育林区,区内的森林资源以云南松天然纯林为主。
-
外业调查工作于2023年11月完成。在全面踏查的基础上,选取具有充分代表性的典型成熟云南松天然纯林,设置6个半径为15.0 m的圆形样地,测定胸径≥5.0 cm活立木的单木位置、树高、胸径[17],由全球定位系统(GPS)获取样地中心位置坐标,用皮尺测量被测木到样地中心点的方位角和水平距,确定每木定位信息,共获取118株云南松样木数据。表1为样木胸径和树高调查结果。
表 1 样地信息统计
Table 1. Statistics of the sample plots
样地编号 优势树种 林木株数 胸径/cm 树高/m 最小值 最大值 平均值 标准差 最小值 最大值 平均值 标准差 1 云南松 23 6.2 33.3 18.6 6.1 1.9 12.9 8.0 2.3 2 云南松 15 13.7 30.4 21.2 4.9 6.8 11.0 8.9 1.4 3 云南松 23 9.6 34.7 19.1 7.0 3.1 12.0 8.0 2.1 4 云南松 25 6.8 30.2 18.1 5.6 3.7 11.1 7.5 1.8 5 云南松 15 9.2 33.3 19.9 6.3 4.3 12.6 8.1 2.1 6 云南松 17 5.8 35.6 20.4 7.5 3.3 13.1 9.1 2.7 -
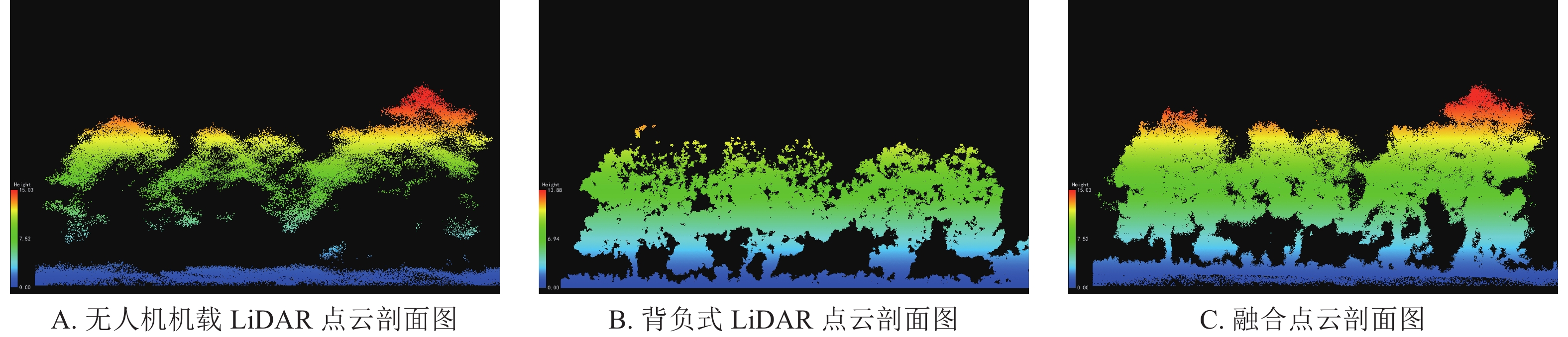
利用搭载LiAir220N激光雷达系统的大疆M300 RTK无人机[配置高精度全球导航卫星系统(global navigation satellite system,GNSS)和惯性测量单元(inertial measurement unit,IMU)],于2023年11月完成外业采集工作。飞行高度为150 m (仿地飞行),飞行速度为4 m·s−1,航向和旁向重叠率均设置为70%,共获取了覆盖6个圆形样地的无人机机载LiDAR点云数据,平均点云密度为2 818点·m−2。同时,利用LiBackpack DGC50背负式LiDAR三维扫描系统(配置水平和垂直2个LiDAR传感器及高精度GNSS设备)进行背负式LiDAR数据的同步采集。系统参数如下:LiDAR传感器为VLP16,激光器扫描距离为100 m,激光波长为903 nm,相对精度为≤3 cm,垂直视场角为−90°~90°,水平视场角为0°~360°。采集人员对各圆形样地按“Z”字形路线图缓慢行进采集数据,行进速度为1 m·s−1。为保证样木胸径的圆拟合,扫描样木两侧,获取树干完整信息。此外,为采集边缘木两侧的数据,路线范围略大于样地范围,共获取了覆盖6个圆形样地的背负式LiDAR点云数据,平均点云密度为18 453点·m−2。由图1可见:无人机机载LiDAR系统由上而下获取点云数据(图1A),受激光束回波次数和枝叶遮挡激光束的影响,林冠中上层密度远高于林下,冠上树顶点信息明显,但树干点云信息缺失严重。背负式LiDAR系统由下而上获取点云数据(图1B),其树干点云较无人机机载LiDAR点云清晰,受回波次数、扫描角度和枝叶遮挡的影响,冠上点云信息明显缺失。
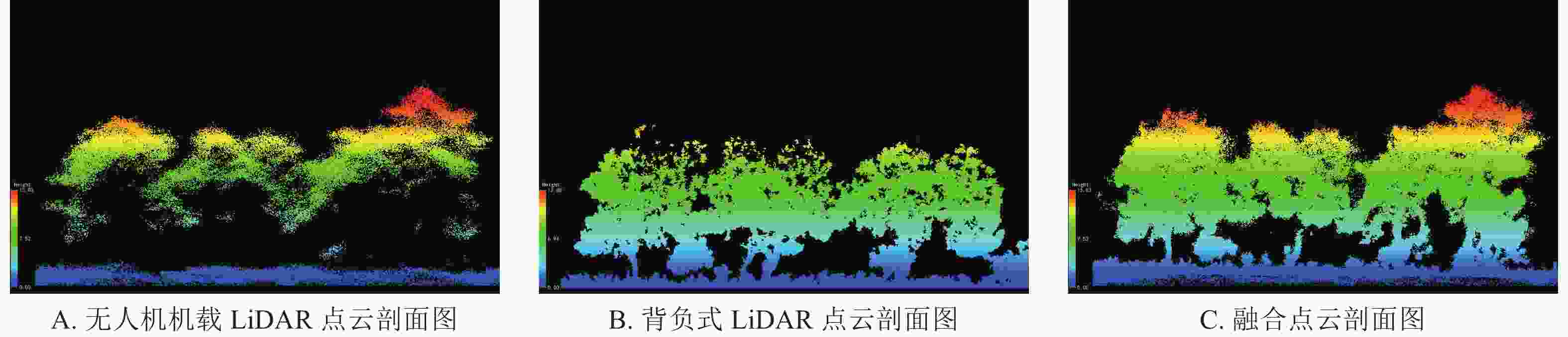
图 1 点云剖面图
Figure 1. Profile of point clouds
-
将背负式LiDAR点云数据进行去噪、点云分类、归一化和单木分割等处理,其中LiDAR360软件对于高程信息的分类是在地面点分类的基础上,进行高于地面的点云分类,设置2个高程阈值,即高度0~1.3 m的低矮植被(灌草)和1.3~20.0 m的中等植被(林木);利用LiDAR360 MLS软件进行深度学习分类,GV_Forest_HLS模型可基于形态学原理,将背负式LiDAR点云数据分为地面点、低矮植被、树干和树冠等类别,通过类别设置将点云数据的类别属性映射到不同颜色值,直观地区分不同类别的点云数据。配合手动编辑分类,将需要修改的点云颜色映射为目标类别颜色。设置点云切片厚度为0.2 m,获取1.2~1.4 m高度的树干圆柱体,通过拟合圆的方式拟合胸径提取种子点,并将基于分类获取的树干和树冠2个点云类别作为单体点进行单木分割,最后在单木分割的基础上对提取的胸径和树高异常值进行手动测量修正。利用LiDAR360软件提供的基于种子点分割方法对无人机机载LiDAR点云进行单木分割。基于种子点分割主要包括种子点选取和分割,主要步骤包括基于归一化点云进行点云分割作为1次分割,提取种子点;利用机载林业模块的种子点编辑功能修正种子点后,进行基于种子点分割的2次分割。
无人机机载LiDAR具有绝对坐标信息,而背负式LiDAR由于树冠遮挡和GPS信号微弱,仅有相对坐标信息,通过LiFuser-BP软件进行全球导航卫星系统(GNSS)轨迹处理和SLAM解算可获取带有绝对坐标的背负式LiDAR点云数据。由于背负式LiDAR与无人机机载LiDAR在GNSS定位误差、获取方式及视角上存在差异,需将无人机机载LiDAR点云作为参考数据,背负式LiDAR作为待配准数据进行粗配准,并利用迭代最近点算法(iterative closest point,ICP)进行精配准,获取完整冠层点云信息。为提高配准运行速度,消除地物噪声,对背负式LiDAR点云进行50%采样率的重采样处理,点云融合后点云进行二次去噪处理,平均点云密度为10 671点·m−2,融合点云剖面图如图1C所示。ICP算法本质上是基于最小二乘法选择参考点云(Ps)和待配准点云(Pt)的最近对应点,迭代平移矩阵t和旋转矩阵R,重复i次平移t和旋转R过程直至收敛,获取最优变换矩阵(R*,t*)完成配准[18]。配准后的点云采用与背负式LiDAR点云相同的分割方法提取胸径和树高信息。配准后的同名点对坐标差值如表2所示,X和Y方向表示点对在水平方向的坐标,Z方向表示点对垂直方向的高程。各方向坐标距离差值较小,点对坐标的均方根(ERMS)为0.326 m,配准效果较好。
表 2 配准后坐标差值
Table 2. Coordinate difference after registration
点对 X/m Y/m Z/m 目标点 参考点 差值 目标点 参考点 差值 目标点 参考点 差值 P0 246 951.78 246 952.09 −0.31 2 809 652.76 2 809 652.23 0.53 2 145.12 2 144.86 0.26 P1 246 964.23 246 964.17 0.06 2 809 657.58 2 809 656.73 0.85 2 146.89 2 146.97 −0.08 P2 246 960.83 246 960.94 −0.11 2 809 647.25 2 809 647.43 −0.18 2 144.64 2 144.40 0.24 P3 246 962.89 246 963.16 −0.27 2 809 640.78 2 809 640.67 0.11 2 145.68 2 145.86 −0.18 P4 246 965.49 246 964.96 0.53 2 809 645.85 2 809 645.44 0.41 2 144.43 2 144.72 −0.29 P5 246 974.35 246 974.42 −0.07 2 809 647.07 2 809 646.91 0.16 2 144.83 2 144.80 0.03 $$ {{\boldsymbol{R}}}^{\mathrm{*}},{{\boldsymbol{t}}}^{\mathrm{*}}={\mathrm{a}\mathrm{r}\mathrm{g}\mathrm{m}\mathrm{i}\mathrm{n}}_{R,t}\frac{1}{\left|{P}_{\mathrm{s}}\right|}\sum\limits_{i=1}^{\left|{P}_{\mathrm{s}}\right|}{||{P}_{\mathrm{t}}^{i}-\left({\boldsymbol{R}}\times {P}_{\mathrm{s}}^{i}+{\boldsymbol{t}}\right)||}^{2} 。 $$ (1) 式(1)中:R*为最优平移矩阵;t*为最优旋转矩阵;Ps为参考点云点集合;${{P}}_{\rm{t}}^i $为平移和旋转待配准点云点集合;R为平移矩阵;t为旋转矩阵。
-
单木分割是胸径和树高等单木参数提取的基础。为比较不同分割方法单木分割的效果,与每木位置进行对比分析,采用准确率(Pd)、召回率(Pr)和F测度(F)评价单木分割精度[19]。
$$ {P}_{\mathrm{d}}=\frac{{N}_{\mathrm{c}}}{{N}_{\mathrm{d}}}\times 100\% \text{;} \quad$$ (2) $$ {P}_{\mathrm{r}}=\frac{{N}_{\mathrm{c}}}{{N}_{\mathrm{r}}}\times 100\% \text{;} \quad$$ (3) $$ F=\frac{2{P}_{\mathrm{r}}\text{×}{P}_{\mathrm{d}}}{{P}_{\mathrm{r}}+{P}_{\mathrm{d}}}\times 100\%\mathrm{。} $$ (4) 式(2)~(3)中:Nc为分割正确的株数;Nd为分割提取株数;Nr为实测参考株数。
-
利用决定系数(R2)、均方根误差(ERMSE)对回归模型的拟合效果进行评价,确定估测值与实测值之间的吻合程度和估测的准确度[20]。
$$ {R}^{2}=1-\frac{\displaystyle \sum\limits_{i=1}^{n}{({y}_{i}-{\hat{y}}_{i})}^{2}}{\displaystyle \sum\limits_{i=1}^{n}{({y}_{i}-\overline{y})}^{2}} ; \qquad$$ (5) $$ {E}_{\mathrm{R}\mathrm{M}\mathrm{S}\mathrm{E}}=\sqrt{\frac{\displaystyle \sum\limits_{i=1}^{n}{({y}_{i}-{\hat{y}}_{i})}^{2}}{n-1}}\mathrm{。} $$ (6) 式(5)~(6)中:$ {y}_{i} $为实测值;$ {\hat{y}}_{i} $为估测值;$ \overline{y} $为实测平均值;n为样本数。
-
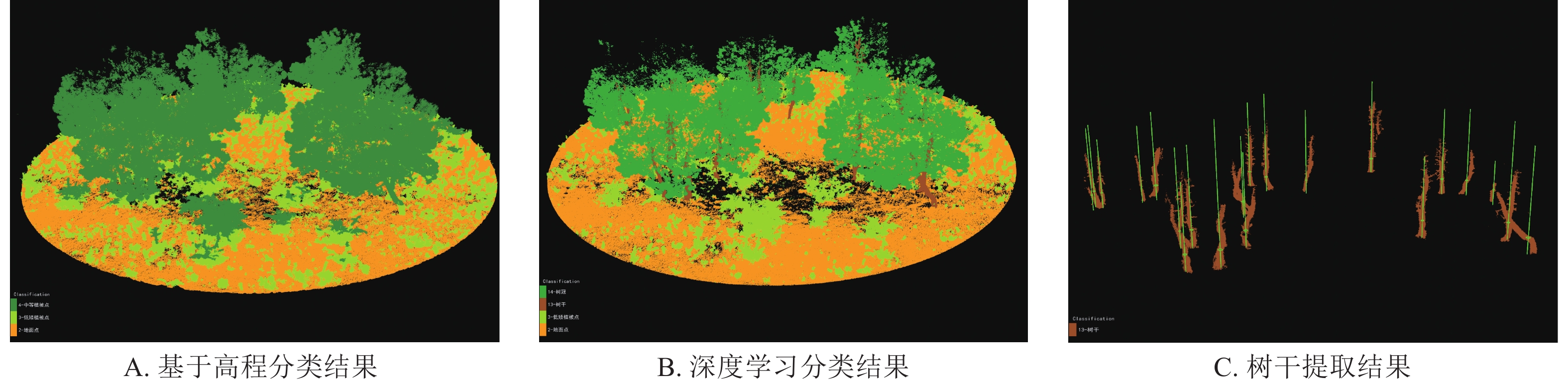
图2为1号样地的背负式LiDAR分类结果。图2A表明:LiDAR360基于高程分类仅将树干与树冠分为1个类别,设置1.3 m的低矮植被点高程阈值,发现样地内部灌木被错误分类为中等植被点(林木)。单木分割时,易受灌草的影响,软件自动在1.3 m处将拟合圆作为胸径拟合结果,导致灌草的冠径被错误识别成胸径。图2B为LiDAR360 MLS基于形态学的深度学习分类结果。相较LiDAR360,LiDAR360 MLS能够将灌草和林木进行有效分类,有效避免高度大于1.3 m灌草的影响,将点云分为地面点、低矮植被点、树干和树冠4个类别。图2C为树干提取结果,效果较好。通过树干提取可实现胸径的高精度拟合,并准确获取与实测相吻合的样木株数,单木提取率达100%。因此,本研究采用LiDAR360 MLS对背负式LiDAR和融合数据进行单木分割,提取胸径和树高信息。

图 2 背负式LiDAR点云分类结果
Figure 2. Point cloud classification results of backpack laser scanning (BLS)
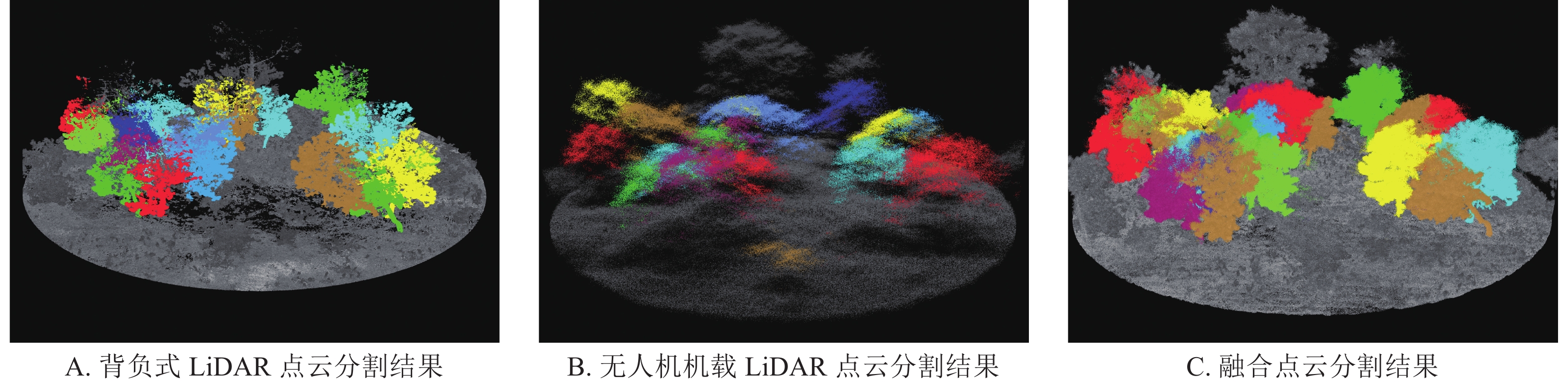
由图3和表3的单木分割结果可见:由于分类时可提取树干信息,样木均被分割提取。背负式LiDAR点云和融合点云的树干提取和单木分割效果相似,召回率均达100%。实测时仅获取达到起测径阶的云南松树种的实测信息,但根据踏查发现样地内存在少数栎类树种和未达到起测径阶的云南松幼树,仅依靠点云信息难以区分云南松和其他树种,因此借助背负式LiDAR点云及融合点云提取株数略大于参考株数。无人机机载LiDAR点云主要依赖点云空间聚类进行分割,树冠形状和分布一定程度上会影响单木分割结果,样地内样木分布不均匀,1.3 m以下树干分叉现象明显,相邻样木树冠重叠,枝杈复杂,易出现欠分割和过分割现象。但总体而言,无人机机载LiDAR点云分割漏分和错分比例较少,准确率、召回率和F测度分别为94.59%、88.98%、91.70%。

图 3 单木分割结果对比
Figure 3. Comparison of individual tree segmentation results
表 3 单木分割验证
Table 3. Individual tree segmentation verification
数据类型 参考株数/株 提取株数/株 正确分割株数/株 漏分株数/株 错分株数/株 单木分割精度评价结果 准确率/% 召回率/% F测度/% 背负式LiDAR 118 126 118 0 0 93.65 100.00 96.72 无人机机载LiDAR 118 111 105 7 6 94.59 88.98 91.70 融合点云 118 126 118 0 0 93.65 100.00 96.72 -
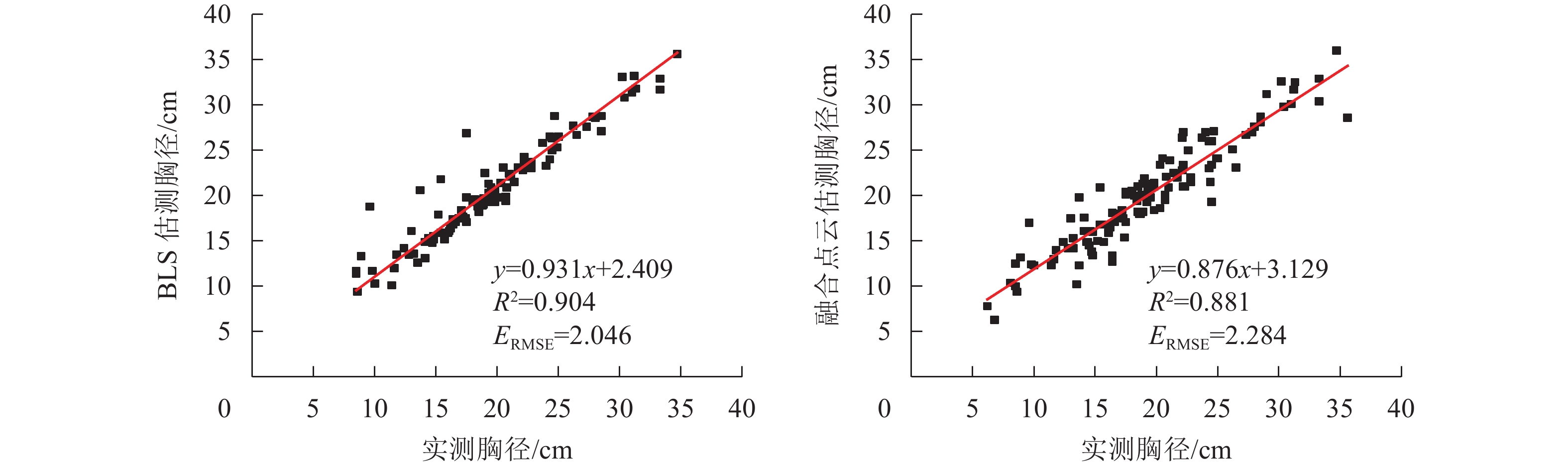
背负式LiDAR和融合点云均可同时获取胸径和树高估测值。由图4的回归拟合结果发现:从应用LiDAR360 MLS软件单独提取的背负式LiDAR数据结果看,胸径提取精度较高,R2和ERMSE分别为0.904和2.046 cm,利用融合点云提取胸径的R2和ERMSE分别为0.881和2.284 cm。融合后受无人机机载LiDAR点云的影响,树干附近的点云噪点增加,与单独使用背负式LiDAR提取胸径相比,精度没有有效提升。

图 4 胸径线性回归结果
Figure 4. Results of DBH linear regression
-
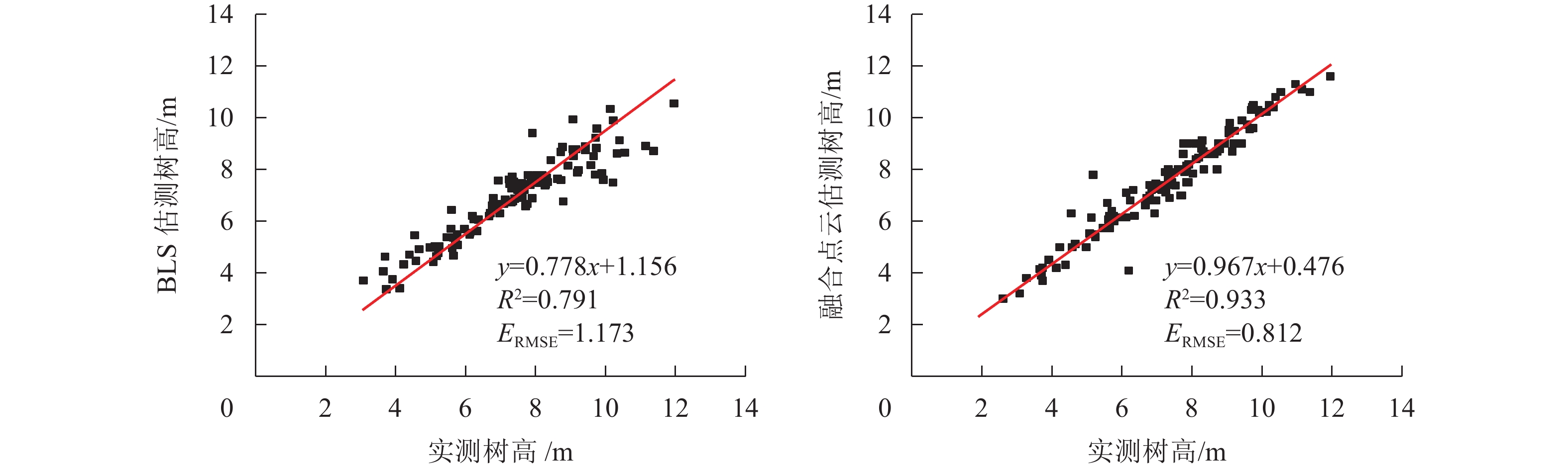
如图5所示:融合无人机机载LiDAR点云后,提取树高的R2相对于背负式LiDAR提升了0.142,主要原因为样地内样木簇生情况明显,且分布不均匀。由于枝叶遮挡、视场角及回波次数限制,背负式LiDAR的树冠上层点云存在一定程度的缺失,提取树高的R2和ERMSE分别为0.791、1.173 m,反映出单独利用背负式LiDAR提取树高存在不足。无人机机载LiDAR与背负式LiDAR点云的融合,结合了无人机机载LiDAR冠上点云获取的优势和背负式LiDAR林下点云获取的优势,通过几何测量计算冠顶点至地面点的垂直高度,树高估测结果准确度更高,R2和ERMSE分别为0.933、0.812 m。

图 5 树高线性回归结果
Figure 5. Results of tree height linear regression
-
无人机机载LiDAR是通过树冠分割和树顶点提取实现单木分割,欠分割和过分割现象明显,而利用深度学习提取背负式LiDAR点云的树干和树冠作为单体进行单木分割,提取率可达100%。本研究基于背负式LiDAR数据利用LiDAR360 MLS软件提取的胸径和树高结果发现:胸径提取精度较高,R2可达0.904,树高提取精度较低,R2仅为0.791。无人机机载LiDAR难以穿透冠层获取树干信息,主要适用于提取冠层信息实现树高信息的高精度提取,进而与实测胸径构建反演模型,实现胸径的估测。背负式LiDAR获取的树干信息完整,胸径提取精度较高,但难以穿透冠层获取树顶端点云,因此树高低估程度较大。GAO等[21]对无人机机载LiDAR采取面向点云的距离判断聚类算法进行单木分割,提取水杉Metasequoia glyptostroboides树高,F测度为90.00%,树高的R2和ERMSE分别为0.913、0.849 m;对背负式LiDAR点云采取基于密度的噪声应用空间聚类(DBSCAN)算法进行单木分割,提取精度较高,F测度为93.00%,胸径的R2和ERMSE分别为0.945、0.013 cm,证明无人机机载LiDAR提取树高和背负式LiDAR提取胸径的显著优势。
本研究融合2种LiDAR点云数据,基于单木分割,提取树高的R2和ERMSE分别为0.933和0.812 m,提取胸径的R2和ERMSE分别为0.881和2.284 cm。受无人机机载LiDAR点云的影响,融合后在树干附近的点云噪点增加,与单独使用背负式LiDAR提取胸径相比,精度没有得到有效提升。代婷婷[22]比较了地基式LiDAR、融合地基式LiDAR与无人机机载高分辨率影像运动恢复结构(structure from motion,SFM)三维重建点云的树高提取值,发现融合点云提取的树高更精准,相关系数(r)达0.999。无人机机载SFM三维重建点云通过正射图像三维重构获取,仅生成冠层点云,对1.3 m处树干的胸径提取影响较小,因此融合点云与地基式LiDAR点云相比,胸径提取值差异不大。朱俊峰等[23]研究表明:由于无人机飞行高度(550 m)较高、飞行速度(96 km·h−1)较快、旁向重叠率(20%)较低等原因,无人机机载LiDAR点云密度较低,地基式LiDAR和无人机机载LiDAR融合点云相对于地基式LiDAR提取的树高精度提升不明显,R2由0.804提升至0.809,且两者ERMSE均较大,分别为3.29和3.32 m。FEKRY等[24]融合了无人机机载LiDAR和背负式LiDAR数据,提取的树高相对均方根误差(rRMSE)与单独使用背负式LiDAR相比,下降了9.01%,但胸径提取的rRMSE提升了0.5%,因此融入无人机机载LiDAR对提取胸径没有提升,反而增加了树干周围的噪点。在点云配准过程中,目前主要是依靠2种点云的树冠轮廓进行匹配,但由于相邻木树冠重叠或林分密度过大使冠形不明显,因此依靠冠形进行配准存在一定的不确定性。无人机机载LiDAR是正射推扫获取点云,而背负式LiDAR是垂直获取点云,冠形存在一定差异,通过冠形有时难以提供准确的特征点。SHAO等[25]通过配准无人机机载LiDAR、背负式LiDAR和地基式LiDAR等3种数据发现:林分密度越大,通过树冠轮廓匹配寻找对应特征点越困难,地形起伏容易影响地面点配准,但本研究样地范围内地形平缓,可忽略这种影响。
利用LiDAR360软件进行胸径自动拟合发现:云南松树干形状较不规则,不属于树干的目标(如灌木和枝叶)也被识别为代表胸径结果的圆。目前主要有圆形拟合、椭圆拟合和圆柱体拟合3种胸径拟合方式,在拟合不规则树干的胸径时均存在较大的拟合误差,需要一种能够适用于不规则形状树干,并能剔除灌木的胸径识别算法,以增加近地LiDAR扫描技术估测森林参数,替代部分样地实测的潜能。徐华东等[26]利用Hough变换法和连续生长算法提取蒙古栎Quercus mongolica的胸径,发现非规则圆形或椭圆形树干容易影响胸径的拟合效果。此外,刘鲁霞等[27]和邱琴等[28]分别基于地基式LiDAR和背负式LiDAR扫描数据,对比了天然林和人工林的胸径拟合和树高提取效果,发现人工林的胸径和树高提取精度明显优于天然林。主要原因在于人工林的林分条件单一,林分密度低,容易探测到树顶点,树干通直,林下灌草较少,胸径拟合结果较准确;天然林中林分复杂,林分密度较高,受枝叶和相邻树木部分遮挡,难以穿透枝叶探测树顶点;林下灌草会被错误识别成林木,树干弯曲情况严重,胸径拟合结果易受影响。本研究利用LiDAR360 MLS软件有效区分了灌草、树干和树冠,并在树干1.3 m处拟合胸径,有效避免了灌草的影响,但1.3 m处树干形状不规则仍然会造成一定程度胸径拟合异常,需要手动修正重新拟合,获取高精度胸径拟合结果。
-
基于背负式LiDAR的LiDAR360 MLS深度学习分类能够有效提取树干和树冠,通过树干1.2~1.4 m处点云切片可以较准确地拟合胸径,利用树干和树冠作为单体进行单木分割,提取单木株数与实际基本吻合,分割效果较好,能够有效地获取高精度的胸径和树高信息。背负式LiDAR和无人机机载LiDAR分别采用自下而上和自上而下的观测模式获取三维点云数据。背负式LiDAR能获取精确林下信息,在提取胸径信息时具有显著优势,但获取的冠层信息不完整,容易低估树高信息。无人机机载LiDAR获取的冠层信息较为完整。通过ICP算法寻求对应点,融合背负式LiDAR和无人机机载LiDAR能够更完整地描述森林空间结构,同步获取高精度的胸径和树高信息,更好地运用于森林资源调查。
Extraction of DBH and height of Pinus yunnanensis individual trees by combining backpack laser scanning and unmanned aerial vehicle laser scanning
-
摘要:
目的 探索基于背负式激光雷达(BLS)和无人机机载激光雷达(ULS)技术获取林分三维点云的优势,利用LiDAR360 MLS和LiDAR360软件实现单木胸径和树高的精准测量,确定效果较优的单木分割和提取方法。 方法 以云南省富民县罗免乡6个半径为15.0 m的圆形云南松Pinus yunnanensis天然纯林样地为例,采用最近迭代点算法(ICP)融合BLS和ULS点云,利用LiDAR360 MLS和LiDAR360软件对点云数据进行去噪、点云分类、归一化和单木分割,并提取单木胸径和树高,利用线性拟合方法建立实测值与估测参数的相关关系,评价胸径和树高的估测效果。 结果 LiDAR360 MLS基于深度学习分类相较于LiDAR360基于高程信息分类,提取的株数信息更符合实际,BLS和融合点云单木提取株数一致,召回率均达100%。ULS通过种子点进行单木分割,效果较好,准确度、召回率和F测度分别为94.59%、88.98%、91.70%,但受冠层连通性影响,仍存在一定的欠分割和过分割情况;基于BLS胸径提取的决定系数(R2)和均方根误差(ERMSE)分别达0.904和2.046 cm,基于BLS树高提取的R2和ERMSE 分别为0.791、1.173 m。融合点云受树干周围离散点的影响,胸径提取效果相对BLS效果较差,R2和ERMSE分别为0.881和2.284 cm,但融合点云冠层和林下信息较完整,树高的估测精度较BLS高,R2和ERMSE分别为0.933、0.812 m。 结论 由于工作原理上的差异,ULS和BLS技术分别在获取冠上和林下点云方面各具优势,融合两者可达到互补的效果,能够更加精细地反映森林空间结构,实现胸径和树高的高精度提取。图5表3参28 Abstract:Objective This study aims to explore the advantages of acquiring three-dimensional point cloud of forests based on backpack laser scanning (BLS) and unmanned aerial vehicle laser scanning (ULS) technology, and use LiDAR360 MLS and LiDAR360 software to realize accurate measurement of single tree diameter at breast height (DBH) and tree height, meanwhile, determine the optimal method for individual tree segmentation and extraction. Method Taking 6 circular plots of Pinus yunnanensis natural pure forest with a radius of 15.0 m in Luomian Township, Fumin County, Yunnan Province as an example, the iterative closest point algorithm (ICP) was employed to fuse BLS and ULS point cloud. LiDAR360 MLS and LiDAR360 software were used to denoise, classify, normalize, segment individual trees and extracted DBH and tree height of individual trees from the point cloud data. The correlation between measured values and estimated parameters was established by linear fitting, and the estimation effect of DBH and tree height was evaluated. Result Compared with LiDAR360 based on elevation information for classification, LiDAR360 MLS based on deep learning for classification was more in line with reality in the number of tree extraction. The tree extraction results from BLS and fusion point cloud were consistent, and the recall rate reached 100%. ULS performed single tree segmentation through seed points, with accuracy, recall, and F-measure of 94.59%, 88.98%, and 91.70%, respectively. However, due to canopy connectivity, there existed some under-segmentation and over-segmentation. The determination coefficient (R2) and root mean square error (ERMSE) of DBH extraction based on BLS were 0.904 and 2.046 cm, respectively. R2 and ERMSE extracted by tree height were 0.791 and 1.173 m, respectively. The fusion point cloud was affected by discrete points around the trunk, and the DBH extraction effect was relatively poorer than BLS. R2 and ERMSE were 0.881 and 2.284 cm, respectively. However, the information of canopy and understory of fusion point cloud was more complete, and the estimation accuracy of tree height was higher than that of BLS, with R2 and ERMSE values of 0.933 and 0.812 m, respectively. Conclusion Due to differences in working principles, ULS and BLS technologies each have their own advantages in acquiring point cloud from the canopy and understory. The combination of ULS and BLS can achieve a complementary effect, which can reflect the forest spatial structure more precisely, and realize the high-precision extraction of DBH and tree height. [Ch, 5 fig. 3 tab. 28 ref.] -
图 2 背负式LiDAR点云分类结果
Figure 2 Point cloud classification results of backpack laser scanning (BLS)
表 1 样地信息统计
Table 1. Statistics of the sample plots
样地编号 优势树种 林木株数 胸径/cm 树高/m 最小值 最大值 平均值 标准差 最小值 最大值 平均值 标准差 1 云南松 23 6.2 33.3 18.6 6.1 1.9 12.9 8.0 2.3 2 云南松 15 13.7 30.4 21.2 4.9 6.8 11.0 8.9 1.4 3 云南松 23 9.6 34.7 19.1 7.0 3.1 12.0 8.0 2.1 4 云南松 25 6.8 30.2 18.1 5.6 3.7 11.1 7.5 1.8 5 云南松 15 9.2 33.3 19.9 6.3 4.3 12.6 8.1 2.1 6 云南松 17 5.8 35.6 20.4 7.5 3.3 13.1 9.1 2.7  下载: 导出CSV
下载: 导出CSV
表 2 配准后坐标差值
Table 2. Coordinate difference after registration
点对 X/m Y/m Z/m 目标点 参考点 差值 目标点 参考点 差值 目标点 参考点 差值 P0 246 951.78 246 952.09 −0.31 2 809 652.76 2 809 652.23 0.53 2 145.12 2 144.86 0.26 P1 246 964.23 246 964.17 0.06 2 809 657.58 2 809 656.73 0.85 2 146.89 2 146.97 −0.08 P2 246 960.83 246 960.94 −0.11 2 809 647.25 2 809 647.43 −0.18 2 144.64 2 144.40 0.24 P3 246 962.89 246 963.16 −0.27 2 809 640.78 2 809 640.67 0.11 2 145.68 2 145.86 −0.18 P4 246 965.49 246 964.96 0.53 2 809 645.85 2 809 645.44 0.41 2 144.43 2 144.72 −0.29 P5 246 974.35 246 974.42 −0.07 2 809 647.07 2 809 646.91 0.16 2 144.83 2 144.80 0.03
下载: 导出CSV
表 3 单木分割验证
Table 3. Individual tree segmentation verification
数据类型 参考株数/株 提取株数/株 正确分割株数/株 漏分株数/株 错分株数/株 单木分割精度评价结果 准确率/% 召回率/% F测度/% 背负式LiDAR 118 126 118 0 0 93.65 100.00 96.72 无人机机载LiDAR 118 111 105 7 6 94.59 88.98 91.70 融合点云 118 126 118 0 0 93.65 100.00 96.72
下载: 导出CSV
-
[1] WALLACE L, LUCIEER A, MALENOVSKÝ Z, et al. Assessment of forest structure using two UAV techniques: a comparison of airborne laser scanning and structure from motion (SfM) point clouds [J/OL]. Forests, 2016, 7(3): 62[2023-12-04]. doi:10.3390/f7030062. [2] 夏洪涛, 郭晓斌, 张珍, 等. 基于不同立地质量评价指标的杉木大径材林分树高-胸径模型[J]. 中南林业科技大学学报, 2023, 43(10): 80 − 88. XIA Hongtao, GUO Xiaobin, ZHANG Zhen, et al. Height-diameter model of Cunninghamia lanceolata large-diameter stands based on various site quality evaluation index [J]. Journal of Central South University of Forestry &Technology, 2023, 43(10): 80 − 88. [3] 刘鲁霞, 庞勇. 机载激光雷达和地基激光雷达林业应用现状[J]. 世界林业研究, 2014, 27(1): 49 − 56. LIU Luxia, PANG Yong. Applications of airborne laser scanning and terrestrial laser scanning to forestry [J]. World Forestry Research, 2014, 27(1): 49 − 56. [4] 韩婷婷. 激光雷达数据在森林垂直结构参数反演中的应用综述[J]. 北京测绘, 2020, 34(8): 1061 − 1065. HAN Tingting. Summarization of the application of LiDAR data in forest vertical structure parameters inversion [J]. Beijing Surveying and Mapping, 2020, 34(8): 1061 − 1065. [5] 杨军, 王帆, 宋仲禹. 基于背包激光雷达构建天然林蒙古栎胸径-树高模型[J]. 森林工程, 2023, 39(5): 57 − 64. YANG Jun, WANG Fan, SONG Zhongyu. Development of natural forest Quercus mongolica diameter-height curve model based on BLS [J]. Forest Engineering, 2023, 39(5): 57 − 64. [6] CORTE A P D, REX F E, de ALMEIDA D R A, et al. Measuring individual tree diameter and height using GatorEye high-density UAV-Lidar in an integrated crop-livestock-forest system [J/OL]. Remote Sensing, 2020, 12(5): 863[2023-12-04]. doi: 10.3390/rs12050863. [7] TAO Shengli, WU Fangfang, GUO Qinghua, et al. Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 110: 66 − 76. [8] 李丹, 庞勇, 岳彩荣, 等. 基于TLS数据的单木胸径和树高提取研究[J]. 北京林业大学学报, 2012, 34(4): 79 − 86. LI Dan, PANG Yong, YUE Cairong, et al. Extraction of individual tree DBH and height based on terrestrial laser scanner data [J]. Journal of Beijing Forestry University, 2012, 34(4): 79 − 86. [9] 黄旭, 贾炜玮, 王强, 等. 背包式激光雷达的落叶松单木因子提取[J]. 森林工程, 2019, 35(4): 14 − 21. HUANG Xu, JIA Weiwei, WANG Qiang, et al. Study on individual tree factor extraction of Larix olgensis in backpack LiDAR [J]. Forest Engineering, 2019, 35(4): 14 − 21. [10] 丁志文, 邢艳秋, 尹伯卿, 等. 融合无人机和地基激光雷达点云数据估测单木结构参数[J]. 森林工程, 2024, 40(1): 142 − 151. DING Zhiwen, XING Yanqiu, YIN Boqing, et al. Fusion of UAV and TLS LiDAR point cloud data for estimating individual tree structure parameters [J]. Forest Engineering, 2024, 40(1): 142 − 151. [11] 李增元, 刘清旺, 庞勇. 激光雷达森林参数反演研究进展[J]. 遥感学报, 2016, 20(5): 1138 − 1150. LI Zengyuan, LIU Qingwang, PANG Yong. Review on forest parameters inversion using LiDAR [J]. Journal of Remote Sensing, 2016, 20(5): 1138 − 1150. [12] 武艳朵. 基于无人机航测数据的森林结构参数提取[D]. 兰州: 兰州交通大学, 2023. WU Yanduo. Forest Structure Parameter Extraction Based on UAV Aerial Survey Data [D]. Lanzhou: Lanzhou Jiaotong University, 2023. [13] 陈思宇, 刘宪钊, 王懿祥, 等. 基于机载LiDAR的高郁闭度华北落叶松林单木识别[J]. 浙江农林大学学报, 2022, 39(4): 800 − 806. CHEN Siyu, LIU Xianzhao, WANG Yixiang, et al. Individual tree detection in the high canopy density Larix principis- rupprechtii forest based on airborne LiDAR [J]. Journal of Zhejiang A&F University, 2022, 39(4): 800 − 806. [14] 朱泊东. 高郁闭度人工林无人机激光雷达单木分割方法研究[D]. 昆明: 西南林业大学, 2024. ZHU Bodong. Research on Individual Tree Segmentation Method of UAV LiDAR in High Canopy Density Plantation [D]. Kunming: Southwest Forestry University, 2024. [15] POLEWSKI P, YAO Wei, CAO Lin, et al. Marker-free coregistration of UAV and backpack LiDAR point clouds in forested areas [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 147: 307 − 318. [16] 张信杰, 郑焰锋, 温坤剑, 等. 融合机载和背包激光雷达的桉树单木因子估测[J]. 林业资源管理, 2022(6): 131 − 137. ZHANG Xinjie, ZHENG Yanfeng, WEN Kunjian, et al. Estimation of single tree factor of eucalyptus by merging airborne and backpack LiDAR [J]. Forest Resources Management, 2022(6): 131 − 137. [17] 李凤日. 测树学[M]. 北京: 中国林业出版社, 2019. LI Fengri. Forest Mensuration [M]. Beijing: China Forestry Publishing House, 2019. [18] 陈春旭, 漆钰晖, 朱一帆, 等. ICP 配准算法的影响因素及评价指标分析[J]. 导航定位与授时, 2018, 5(5): 67 − 72. CHEN Chunxu, QI Yuhui, ZHU Yifan, et al. Analysis of influencing factors and evaluation index of ICP registration algorithm [J]. Navigation,Positioning and Timing, 2018, 5(5): 67 − 72. [19] 张玉薇, 张超, 王娟, 等. 基于UAV遥感的单木冠幅提取及胸径估算模型研究[J]. 林业资源管理, 2021(3): 67 − 75. ZHANG Yuwei, ZHANG Chao, WANG Juan, et al. Individual tree crown width extraction and DBH estimation model based on UAV remote sensing [J]. Forest Resources Management, 2021(3): 67 − 75. [20] 贾鹏刚, 夏凯, 董晨, 等. 基于无人机影像的银杏单木胸径预估方法[J]. 浙江农林大学学报, 2019, 36(4): 757 − 763. JIA Penggang, XIA Kai, DONG Chen, et al. Predicting DBH of a single Ginkgo biloba tree based on UAV images [J]. Journal of Zhejiang A&F University, 2019, 36(4): 757 − 763. [21] GAO Sha, ZHANG Zhengnan, CAO Lin. Individual tree structural parameter extraction and volume table creation based on near-field LiDAR data: a case study in a subtropical planted forest [J/OL]. Sensors, 2021, 21(23): 8162[2023-12-04]. doi: 10.3390/s21238162. [22] 代婷婷. 基于UAV和 TLS 的林木参数提取[D]. 南京: 南京林业大学, 2020. DAI Tingting. Forest Structure Parameter Extraction Based on UAV and TLS [D]. Nanjing: Nanjing Forestry University, 2020. [23] 朱俊峰, 刘清旺, 崔希民, 等. 地基与无人机激光雷达结合提取单木参数[J]. 农业工程学报, 2022, 38(14): 51 − 58. ZHU Junfeng, LIU Qingwang, CUI Ximin, et al. Extraction of individual tree parameters by combining terrestrial and UAV LiDAR [J]. Transactions of the Chinese Society of Agricultural Engineering, 2022, 38(14): 51 − 58. [24] FEKRY R, YAO Wei, CAO Lin, et al. Ground-based/UAV-LiDAR data fusion for quantitative structure modeling and tree parameter retrieval in subtropical planted forest [J/OL]. Forest Ecosystems, 2022, 9: 100065[2023-12-04]. doi: 10.1016/j.fecs.2022.100065. [25] SHAO Jie, YAO Wei, WAN Peng, et al. Efficient co-registration of UAV and ground LiDAR forest point clouds based on canopy shapes [J/OL]. International Journal of Applied Earth Observation and Geoinformation, 2022, 114: 103067[2023-12-04]. doi: 10.1016/j.jag.2022.103067. [26] 徐华东, 陈文静, 刘华. 基于三维激光扫描的单木胸径和树高提取[J]. 森林与环境学报, 2019, 39(5): 524 − 529. XU Huadong, CHEN Wenjing, LIU Hua. Single-wood DBH and tree height extraction using terrestrial laser scanning [J]. Journal of Forest and Environment, 2019, 39(5): 524 − 529. [27] 刘鲁霞, 庞勇, 李增元. 基于地基激光雷达的亚热带森林单木胸径与树高提取[J]. 林业科学, 2016, 52(2): 26 − 37. LIU Luxia, PANG Yong, LI Zengyuan. Individual tree DBH and height estimation using terrestrial laser scanning (TLS) in a subtropical forest [J]. Scientia Silvae Sincae, 2016, 52(2): 26 − 37. [28] 邱琴, 张文革, 王蕾, 等. 基于背包式激光雷达的天山云杉林单木因子估测[J]. 林业资源管理, 2021(2): 99 − 109. QUI Qin, ZHANG Wen’ge, WANG Lei, et al. Estimation of single wood factor of Picea schrenkiana var. tianshanica forest based on backpack LiDAR [J]. Forest Resources Management, 2021(2): 99 − 109. -

-
链接本文:
https://zlxb.zafu.edu.cn/article/doi/10.11833/j.issn.2095-0756.20240107
 点击查看大图
点击查看大图
计量
- 文章访问数: 2234
- HTML全文浏览量: 778
- PDF下载量: 106
- 被引次数: 0
