




-
随着机器人技术与无人驾驶技术的迅速发展,同时定位与地图构建(SLAM)技术在复杂环境中的应用受到学术界与工业界的广泛关注。其中,视觉SLAM通过摄像设备采集环境图像,结合特征点提取、匹配与跟踪等方法,实现高精度的自定位与地图构建。导向式快速旋转二进制描述符(ORB)算法是视觉SLAM中广泛应用的特征点提取方法之一。自2011年提出以来,该算法通过整合加速分割测试特征点(FAST)角点检测与二进制鲁棒独立基本特征点(BRIEF)描述符,并引入旋转不变性,提供了快速且鲁棒的特征点检测与描述能力,逐渐成为尺度不变特征点转换(SIFT)与加速稳健特征点(SURF)等传统方法的高效替代方案。随着时间的推移,对算法性能和稳定性的不断追求驱使研究人员进行了一系列改进和优化[1−2]。RUBLEE等[3]在2014年对ORB算法进行了改进,针对其匹配准确性和光照变化的鲁棒性提出了优化方案,包括改进描述符生成和关键点方向估计方法。2017年起,随着深度学习的兴起,研究者开始尝试结合卷积神经网络进行描述符生成或端到端训练,以进一步提升ORB算法的性能[4−5]。
尽管如此,ORB在处理复杂纹理环境时仍面临挑战,例如GARFORTH等[6]研究表明:ORB算法在城市环境中拥有较强的鲁棒性,但在复杂纹理背景如森林环境中,特征点提取仍存在局限。视觉SLAM系统的核心目标是从环境中提取稳定且富有信息的特征点,这对于地图构建和定位精度至关重要。在复杂的林区环境中,树干和树枝是相对稳定且易于识别的特征。相较于草地或树叶,树干和树枝的特征更加明显且不易受环境变化(如光照、风等)干扰,因此,通过增加树干和树枝的提取数量,可以直接提升特征点提取的精度,从而证明算法在复杂环境中的有效性。
然而,传统的特征点检测算法主要针对局部特征点的质量提升而非特定地物类型的识别[7],难以应对林区场景因树叶等不稳定特征点过多导致的匹配、建图失败的问题,且现有的ORB特征点检测改进研究集中在多尺度融合和检测算法融合等方面[8−11]。将灰度共生矩阵(GLCM)用于改进ORB特征点检测的研究相对较少,且针对林地环境的适用性探索几乎为空白。为此,本研究探索结合灰度共生矩阵进行纹理分析,提升特定类型特征点的识别能力,通过捕捉大尺度纹理信息,如对比度、相关性和均匀性,区分树干与树叶等地物纹理,从而提高图像特征点提取在林地环境中的稳定性和精度。
另外,林区环境中的光照变化复杂,如阴影和不均匀照明,常影响特征点检测的准确性[12]。为提升图像质量并稳定特征点检测,本研究采用对比度受限自适应直方图均衡化(CLAHE)技术进行图像增强,该技术以显著的对比度提升效果广泛应用于图像处理中[13−16]。同时,本研究进一步提出全局局部CLAHE方法,通过全图增强整体对比度,并对局部区域细化处理,以提高ORB算法在复杂纹理环境下的性能和特征点检测的准确性。
-
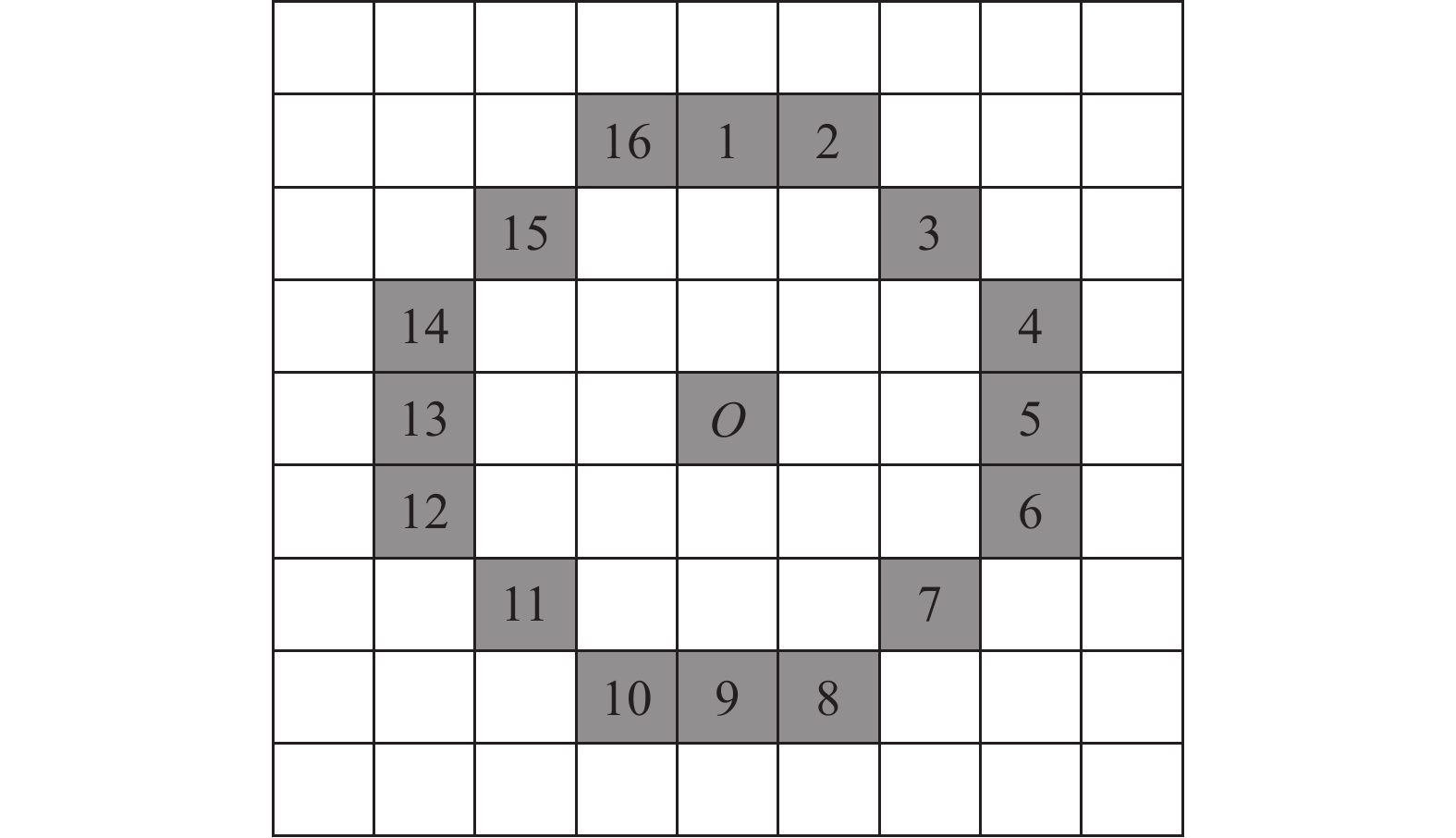
ORB特征点提取算法的原理是利用FAST角点检测器检测图像中灰度变化明显的区域。如果一个像素和周围的像素差别较大,它很可能是角点。具体原理如图1所示。
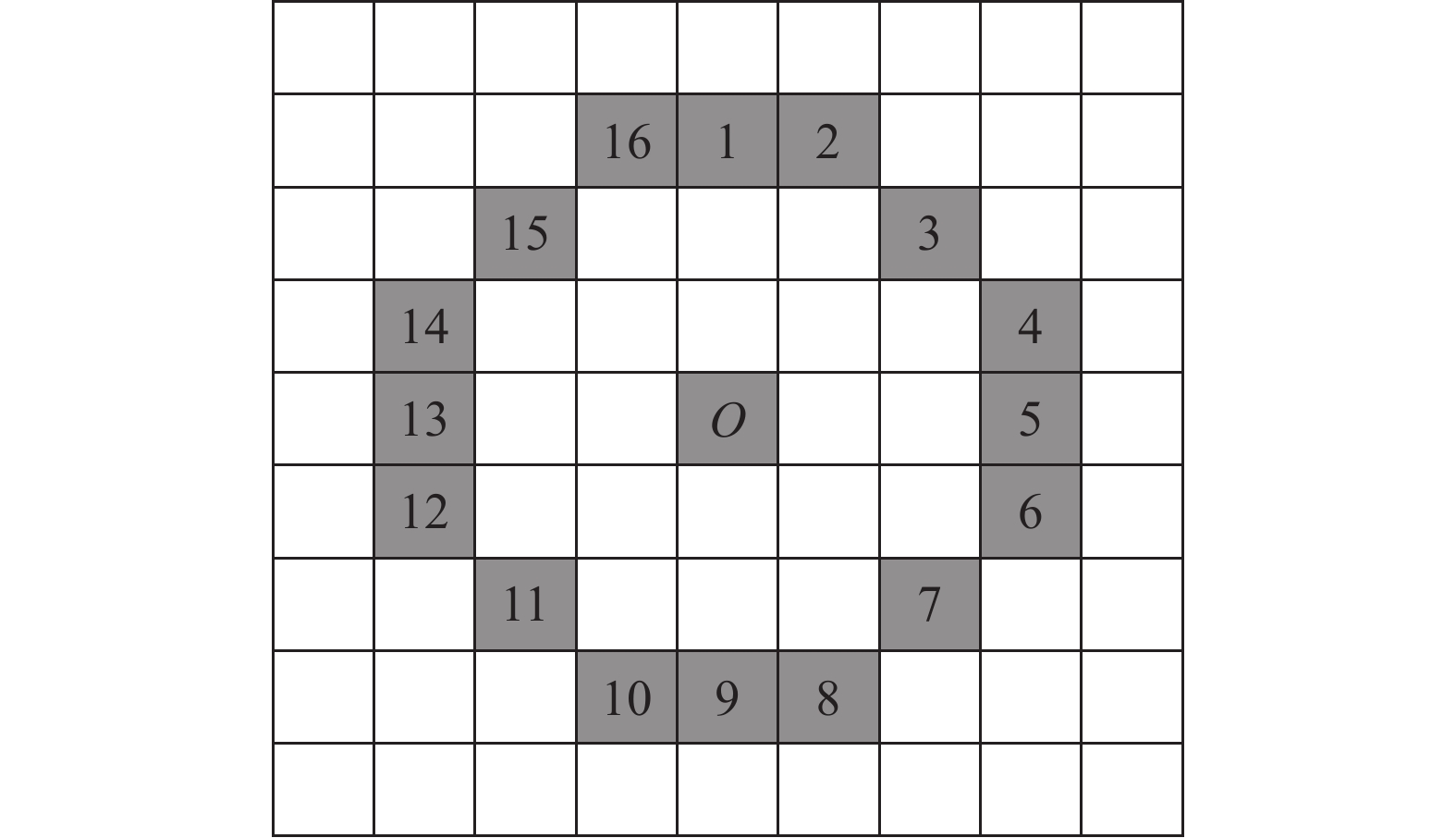
图 1 ORB特征点计算
Figure 1. ORB feature point calculation
关键点提取后使用BRIEF描述子进行描述,并存储关键点的信息。具体过程为:①在图像中有某像素O,其亮度记为IO。②选择以O为圆心,半径为3的圆上的所有像素点。③设置1个亮度阈值记为T,T一般选择$ {I}_{O} $的20%。④若圆上有连续的12个点亮度大于$ {I}_{O} $+T或小于$ {I}_{O} $−T,则该点记为特征点。
-
CLAHE常用于改善图像对比度效果。传统的CLAHE直接将区域按4×4、8×8的方式划分,进行整张图像的增强处理。本研究考虑到复杂纹理环境中可能在光影处隐藏较多纹理信息,一次增强难以充分提取特征的情况[17−18],选择采用全局局部二次增强的方式对图像进行处理。全局局部CLAHE首先对整张图像进行1次全局的CLAHE处理,增加整张图像的对比度,然后对第1次增强划分的每个网格区域,采用分析直方图的方法进行打分,若符合进一步增强的打分标准,则对该区域进行第2次增强。第2次增强主要针对第1次增强后对比度仍然较低且存在纹理信息的区域。针对这些区域采用评分的方式进行筛选,评分时选择灰度级宽度和变异系数2个指标作为打分依据[19−20],其中灰度级宽度即区域最大灰度值减去最小灰度值,代表了区域内灰度值的动态范围。较大的灰度级宽度通常表示区域内的对比度较高,细节丰富。变异系数是标准差与均值的比值,反映了灰度值的分散程度。变异系数较高表示区域内灰度值变化大,可能存在较多细节或纹理,因此考虑使用这2个指标作为评分依据。具体公式为:S=RWCV。其中:S为评分分数;RW为灰度级宽度;CV为变异系数。S越大分数越高,说明该区域细节较丰富,存在图像增强的潜力。
在具体进行区块划分和参数设置时,本研究将原始图像分割成4×4个相同大小的区块,然后在每个区块上独立地应用直方图均衡化,为避免林区光照条件下对比度过度增强而失真,设置cliplimit为1。为了确认经第1次图像增强后需要第2次增强的区域,对第1次4×4增强后的16个分块进行评分,评分低的区域进行第2次增强。根据计算,本研究中使用图像变异系数均为0.6~1.0,灰度级宽度为0~255。由公式S=RWCV可知:评分S的阈值设置为150。局部CLAHE将已经进行全局增强的图像分割成更小的8×8区块。考虑到边缘效应,本研究在局部增强后采用高斯模糊[21]对第2次增强和第1次增强区域的边缘进行模糊处理,防止第2次增强放大边缘效应,最后得到全局局部CLAHE增强图像。
特征点响应值是特征点检测算法中用于判断某个像素是否为特征点的关键指标。它通过数学函数量化像素邻域的局部特征。特征响应值越高,该点越可能被视为有效特征点。本研究图像增强效果主要通过计算特征点响应值的大小和其统计指标进行评价。
-
传统ORB特征点检测使用Harris算法筛选特征点[22]。本研究以林地作为复杂纹理环境的研究场景,使目标检测更适用于林地环境[23],选择GLCM作为特征点筛选的方法。GLCM是一种用来分析图像纹理特征的重要方法,通过计算图像中有一定距离和一定方向的2个像素之间的灰度相关性,对图像的所有像素进行调查统计,反映图像在方向、相邻间隔、变化幅度及快慢上的综合信息[24−25],其归一化矩阵主要可以用来计算以下统计特征:对比度、均匀性、熵值、相关性、能量、同质性等。由于筛选目标具有分布均匀,与周围环境有明显对比度差异,灰度依赖性强等特点,而GLCM的一些统计特征可以满足这样的筛选特点,例如对比度:反映图像中局部灰度变化,值越高表示纹理越清晰;均匀性:度量灰度分布的均匀性,值越高表示纹理越平滑;相关性:衡量灰度值对的线性相关性,值越高表示纹理方向一致性越强[26−27],因此本研究主要探索上述统计特征中的对比度、均匀性和相关性对林地特征的影响。
在具体使用纹理分析时设置合适的参数和阈值将显著提升纹理分析的效果。由于本研究主要保留树干等地物信息,90°的角度有助于捕捉垂直结构的细节变化,距离为1为常见的默认值,尤其在林地这种自然环境中,图像的分辨率通常较高,距离为1可以确保捕捉到较细微的纹理变化,同时避免过大的距离导致提取的纹理特征过于宽泛,失去细节[28]。因此,将GLCM中的角度设置为90°,距离设置为1。计算并归一化GLCM后,提取GLCM中的相关特征,包括对比度、均匀性、相关性。为有效筛选出道路、树干、树枝以及部分灌木的特征,初始对比度为50~800,均匀性为0~1,相关性为−1~1。经过多次实验对比,发现将对比度设置为250,均匀性为0.13,相关性为0.75,将取得较好的特征提取效果。
-
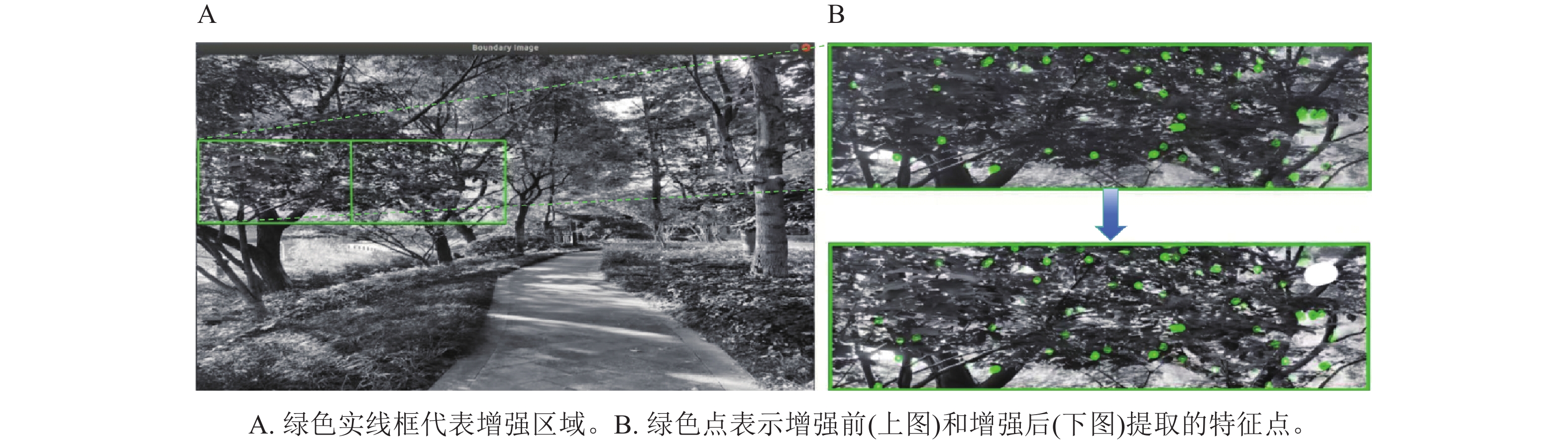
为验证算法,在浙江省杭州市临安区浙江农林大学图书馆东侧林地手持安卓设备进行数据采集。采集地植物覆盖较为密集,包含草地、灌木丛以及高大乔木。采集时间为2024年5月8日16:00—17:20,天气晴,无风,图像包含实验所需的主要地物,如树木、灌木等,拍摄多张图像最后选择最具代表性的图像作为本研究的场景(图2)。
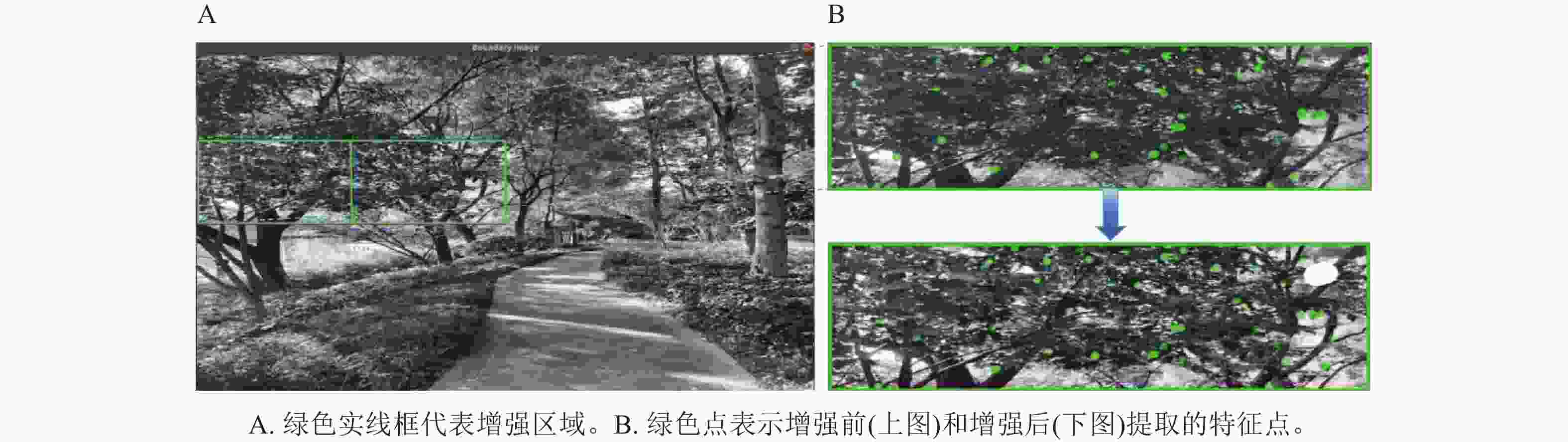
图 2 图像增强提取特征点
Figure 2. Image enhancement for feature point extraction
-
按照上述图像增强的策略,图像增强前后的图像细节效果和ORB特征点提取效果如图2所示。全局局部CLAHE在原图像上进一步细化对比度,特别是对比度较低的区域。更多树枝缝隙间的特征点得到了提取,地物的细节提取效果进一步提升。
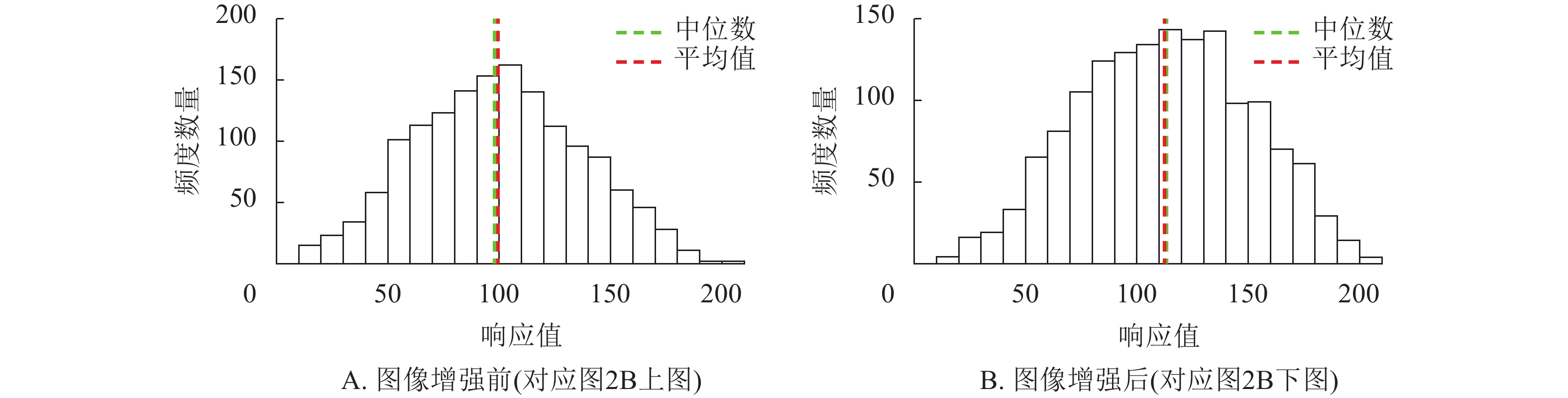
在ORB-SLAM3系统进行特征点提取后,调用其中计算过的特征点响应值,将响应值大小按10的步长划分,统计各区间内响应值的数量记为频度数量,结果显示:增强前(图3A)特征点集中在响应值为90~120,呈现出中间高两边低的分布。增强后(图3B)分布近似,但是整体向右移动,中位数和平均值明显上升,且出现在特征点响应值最集中的区域。为定量分析图像增强前后特征点响应值的变化,表1列出特征点响应值的统计指标。由表1可见:经过图像增强后,特征点响应值的中位数从98上升至113,平均值则从99.27上升至112.05,表明整体特征点响应值有所上升。
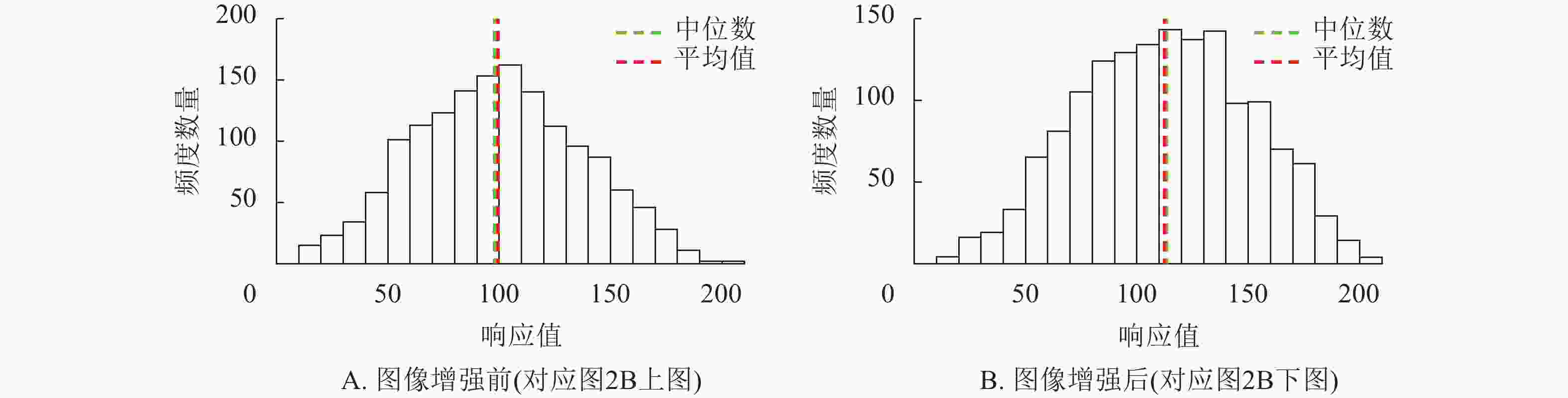
图 3 图像增强前后特征点响应值
Figure 3. Response values of feature points before and after image enhancement
表 1 特征点质量统计指标
Table 1. Statistical indicators of feature point quality
图像类别 特征点响应值的统计指标 最小值 最大值 中位数 平均值 标准差 25%分位数(Q1) 50%分位数(Q2) 75%分位数(Q3) 原始图像 10 209 98 99.27 36.97 73 98 125 增强图像 16 205 113 112.05 37.07 84 113 139 本研究结果表明:经过图像增强后,特征点响应值的整体分布向高响应值区间偏移,增强处理有效提升了特征点的检测效果。特征点响应值的平均值和中位数均有所提升,表明整体检测质量有所提高,而标准差变化较小,说明增强后特征点的稳定性仍然得到了保持。因此,增强方法对特征点检测具有明显改进的效果。
-
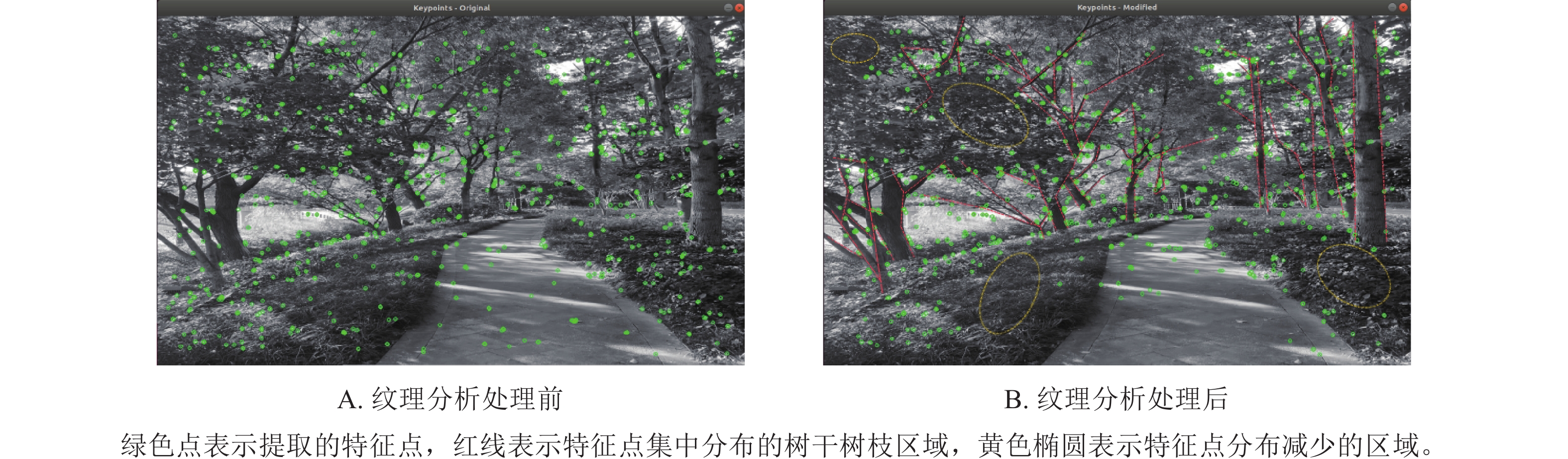
纹理分析处理前后的ORB特征点提取效果对比如图4所示。纹理分析处理前的ORB特征点在图中的分布零散(图4A),而处理后提取的特征点呈现出更集中于红色线条即树干树枝边缘分布的特征,黄色椭圆区域即树叶杂草区域的特征点分布减少(图4B)。
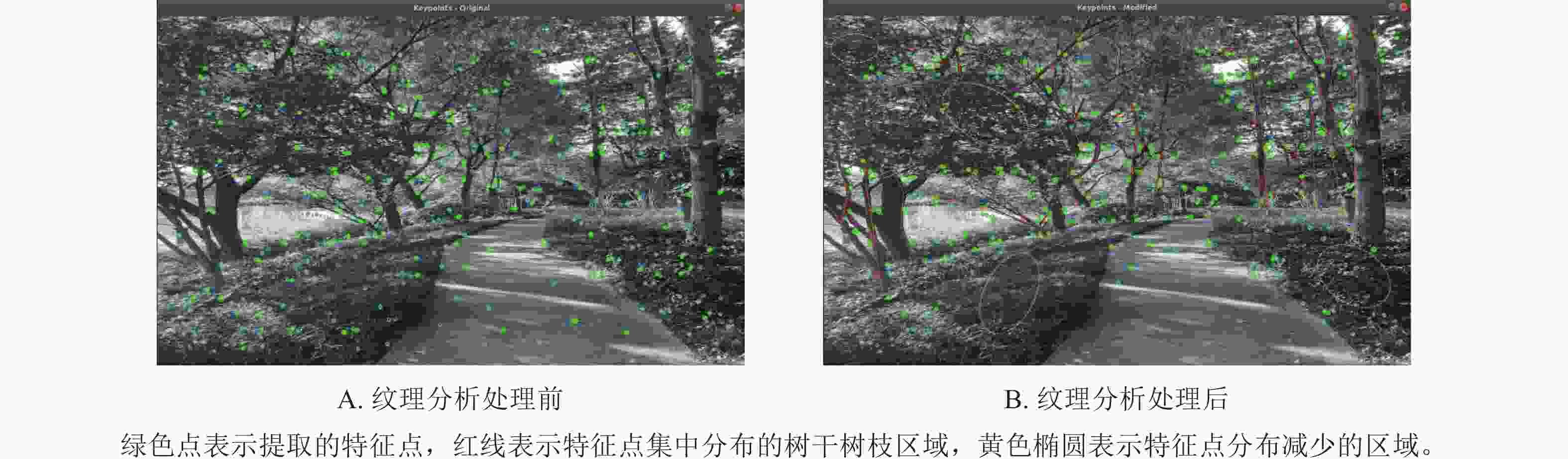
图 4 纹理分析处理前后的ORB特征点对比图
Figure 4. Comparison chart of ORB feature points before and after texture analysis and processing
由表2可见:相比于传统Harris算法,GLCM对树干和树枝的特征点的提取数量占比分别提高了5.78%和5.08%,对草地特征点提取比例降低到4.88%,表明GLCM算法对树干和树枝的提取比例相对较高,在重点区域展现出较强的特征点提取能力。
表 2 Harris特征点筛选算法与改进后GLCM特征点筛选算法对比
Table 2. Comparison between Harris feature point screening algorithm and the improved GLCM feature point screening algorithm
提取位置 Harris GLCM 提取位置 Harris GLCM 数量/个 占比/% 数量/个 占比/% 数量/个 占比/% 数量/个 占比/% 树枝 224 22.31 275 27.39 草地 96 9.56 49 4.88 树干 79 7.87 137 13.65 灌木 150 14.94 117 11.65 树叶 344 34.26 341 33.96 其他 23 3.29 38 3.78 道路 78 7.77 47 4.68 合计 1 004 100.00 1 004 100.00 -
森林环境中由于光照变化频繁,传统方法往往难以处理这些差异。CLAHE通过增强对比度,可提升特征点的可检测性。本研究不仅应用CLAHE的全局增强功能,还在现有研究[18]的基础上添加了局部增强,确保不同区域的细节得到保留,特征点提取精度有所提高。CLAHE的这一优势使得ORB算法在复杂环境下表现更加稳定,有效减小了由于光照变化带来的干扰。
-
除Harris算法外,常见特征点提取算法还有SURF和SIFT等方法。上述算法的优势主要体现在尺度不变性和较强鲁棒性:在处理噪声和复杂背景时通常表现出更好的鲁棒性,但在纹理复杂的森林环境中特征提取往往不够可靠。GLCM作为一种基于纹理的特征提取方法,主要关注图像的灰度共生关系,适用于提取图像中细微的纹理特征。在纹理复杂的森林环境中,GLCM可以更有效地识别特定物体的纹理特征,优先提取重点关注地物的特征点,以实现更精准的特征点提取。
-
由于实验设备、场地和时间等方面的限制,本研究未能获得所采用图像的精确真值,因此无法进行更加严格的特征点定位精度定量评估,这在一定程度上影响了结论的严谨性。
然而,本研究的核心目标是提出一种基于图像增强与纹理分析的改进方法,旨在提升ORB算法对复杂森林环境特征点提取的稳定性。本研究的对比分析基于特征点分布的一致性与集中程度,相对位置的合理性反映了算法的改进效果。因此,未测量真值不影响对改进方法有效性的整体评估。
未来研究可以引入专业测绘设备,如激光雷达扫描仪,以提供高精度的特征点定位真值,从而更全面地评估本方法在定位精度上的提升效果。此外,进一步扩大数据集规模并丰富环境场景的多样性,将有助于评估改进算法在不同复杂纹理场景中的适应性与稳定性,这对于提高算法在实际应用中的通用性具有重要意义。
-
本研究基于实地采集的林地图像,采用图像增强和纹理分析的方法,对ORB算法进行了改进。结果表明:相比于传统ORB算法,采用CLAHE全局局部增强后,特征点响应值的中位数和平均值均有所上升,平均值从99.27上升至112.05,中位数从98上升至113,提高了特征点提取的准确度。经过GLCM纹理分析处理后,树干和树枝的特征点数量分别提升了5.78%和5.08%,而草地的特征点比例则下降至4.88%。这种变化表明,重点区域(如树枝和树干)的特征点提取数量增加,采用纹理分析的改进算法更适合于林地环境的特征点提取。
Improvement of ORB feature point extraction algorithm in complex forest environments
-
摘要:
目的 林区环境通常具有丰富的纹理和不均匀的光照条件,这导致传统的导向式快速旋转二进制描述符(ORB)图像特征点提取方法在提取树干和树枝等重要特征的过程中面临挑战。通过对现有算法的研究和改进,解决林区复杂纹理环境下ORB特征点提取的问题。 方法 引入全局局部对比度受限自适应直方图均衡化(CLAHE)图像增强技术,以改善林地特征点提取的效果。同时,探讨灰度共生矩阵(GLCM)在纹理分析中的应用,研究其对特征点筛选的影响,从而使特征点的提取更聚焦于树干和树枝的特征。通过这些方法的结合,力求提升特征点的响应值及数量,进而增强特征提取的整体性能。 结果 经过图像增强后,特征点响应值的中位数从98上升至113,均值则从99.27上升至112.05;经过GLCM纹理分析处理后,树干和树枝的特征点数量分别提升约5.78%和5.08%,而草地的特征点比例则下降至约4.88%。 结论 本方法在林区复杂环境中展现了良好的适应性,不仅提高了特征点提取的准确性,还为后续的林区图像分析奠定了基础。图4表2参28 -
关键词:
- 林区环境 /
- 导向式快速旋转二进制描述符特征点提取 /
- 对比度受限自适应直方图均衡化 /
- 灰度共生矩阵 /
- 特征点响应值
Abstract:Objective Forest environments are often characterized by rich textures and uneven lighting conditions, which poses challenges for traditional oriented FAST and rotated BRIEF (ORB) image feature extraction methods in extracting key features such as tree trunks and branches. This study aims to solve the problem of ORB feature extraction in complex forest environments through research and improvement of existing algorithms. Method The global and local Contrast Limited Adaptive Histogram Equalization (CLAHE) image enhancement technique was introduced to improve the effect of forest land feature extraction. Meanwhile, the application of Gray Level Co-occurrence Matrix (GLCM) in texture analysis was explored to investigate its impact on feature point selection, so that the extraction of feature points could be more focused on the features of tree trunks and branches. By integrating these methods, efforts were made to enhance the response value and the number of feature points, thereby improving the overall performance of feature extraction. Result After image enhancement, the median response value of feature points increased from 98 to 113, and the mean value increased from 99.27 to 112.05. After GLCM texture analysis, the number of feature points on tree trunks and branches increased by approximately 5.78% and 5.08% respectively, while the proportion of feature points on grassland decreased to about 4.88%, demonstrating a significant improvement. Conclusion The proposed method demonstrates good adaptability in complex forest environments, which not only improves the accuracy of feature extraction but also lays a foundation for subsequent forest image analysis. [Ch, 4 fig. 2 tab. 28 ref.] -
Key words:
- forest environment /
- ORB feature extraction /
- CLAHE /
- GLCM /
- feature point response value
-
图 3 图像增强前后特征点响应值
Figure 3 Response values of feature points before and after image enhancement
图 4 纹理分析处理前后的ORB特征点对比图
Figure 4 Comparison chart of ORB feature points before and after texture analysis and processing
表 1 特征点质量统计指标
Table 1. Statistical indicators of feature point quality
图像类别 特征点响应值的统计指标 最小值 最大值 中位数 平均值 标准差 25%分位数(Q1) 50%分位数(Q2) 75%分位数(Q3) 原始图像 10 209 98 99.27 36.97 73 98 125 增强图像 16 205 113 112.05 37.07 84 113 139  下载: 导出CSV
下载: 导出CSV
表 2 Harris特征点筛选算法与改进后GLCM特征点筛选算法对比
Table 2. Comparison between Harris feature point screening algorithm and the improved GLCM feature point screening algorithm
提取位置 Harris GLCM 提取位置 Harris GLCM 数量/个 占比/% 数量/个 占比/% 数量/个 占比/% 数量/个 占比/% 树枝 224 22.31 275 27.39 草地 96 9.56 49 4.88 树干 79 7.87 137 13.65 灌木 150 14.94 117 11.65 树叶 344 34.26 341 33.96 其他 23 3.29 38 3.78 道路 78 7.77 47 4.68 合计 1 004 100.00 1 004 100.00
下载: 导出CSV
-
[1] 权美香, 朴松昊, 李国. 视觉SLAM综述[J]. 智能系统学报, 2016, 11(6): 768−776. QUAN Meixiang, PIAO Songhao, LI Guo. An overview of Visual SLAM [J]. CAAI Transactions on Intelligent Systems, 2016, 11(6): 768−776. [2] 王朋, 郝伟龙, 倪翠, 等. 视觉SLAM方法综述[J]. 北京航空航天大学学报, 2024, 50(2): 359−367. WANG Peng, HAO Weilong, NI Cui, et al. An overview of visual SLAM methods [J]. Journal of Beijing University of Aeronautics and Astronautics, 2024, 50(2): 359−367. [3] RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]//ZABIH R. 2011 International Conference on Computer Vision (ICCV). Barcelona: IEEE, 2011: 2564−2571. [4] MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras [J]. IEEE Transactions on Robotics, 2017, 33(5): 1255−1262. [5] 赵洋, 刘国良, 田国会, 等. 基于深度学习的视觉SLAM综述[J]. 机器人, 2017, 39(6): 889−896. ZHAO Yang, LIU Guoliang, TIAN Guohui, et al. A survey of visual SLAM based on deep learning [J]. Robot, 2017, 39(6): 889−896. [6] GARFORTH J, WEBB B. Visual appearance analysis of forest scenes for monocular SLAM[C]//DUDEK G. 2019 International Conference on Robotics and Automation (ICRA). Montreal: IEEE, 2019: 1794−1800. [7] 王霞, 左一凡, 李磊磊, 等. 基于自适应纹理复杂度的仿生视觉导航方法研究[J]. 导航定位与授时, 2020, 7(4): 35−41. WANG Xia, ZUO Yifan, LI Leilei, et al. Bionic visual navigation method based on adaptive texture complexity [J]. Navigation Positioning and Timing, 2020, 7(4): 35−41. [8] 邹斌, 赵小虎, 尹智帅. 基于改进ORB的图像特征匹配算法研究[J]. 激光与光电子学进展, 2021, 58(2): 0210006-1−0210006-8. ZOU Bin, ZHAO Xiaohu, YIN Zhishuai. Image feature matching algorithm based on improved ORB [J]. Laser & Optoelectronics Progress, 2021, 58(2): 0210006-1−0210006-8. [9] 刘天赐, 宋延嵩, 李金旺, 等. 基于ORB特征的高分辨率图像拼接改进算法[J]. 激光与光电子学进展, 2021, 58(8): 0810004-1−0810004-8. LIU Tianci, SONG Yansong, LI Jinwang, et al. Improved algorithm for high-resolution image stitching based on ORB features [J]. Laser & Optoelectronics Progress, 2021, 58(8): 0810004-1−0810004-8. [10] 郭俊阳, 胡德勇, 潘祥, 等. 基于改进ORB特征的图像处理方法[J]. 海南热带海洋学院学报, 2024, 31(2): 47−52. GUO Junyang, HU Deyong, PAN Xiang, et al. Image processing method based on improved ORB features [J]. Journal of Hainan Tropical Ocean University, 2024, 31(2): 47−52. [11] 冯丽琦, 赵亚琴, 孙一超, 等. 复杂环境下森林火灾火焰局部纹理提取方法[J]. 中国农机化学报, 2019, 40(7): 103−108. FENG Liqi, ZHAO Yaqin, SUN Yichao, et al. Method for extracting local texture of forest fire flame in complex environment [J]. Journal of Chinese Agricultural Mechanization, 2019, 40(7): 103−108. [12] 崔鑫彤. 面向林业机器人视觉系统的特征匹配方法研究[D]. 北京: 北京林业大学, 2015. CUI Xintong. Feature Matching for Vision System in Forestry Robot[D]. Beijing: Beijing Forestry University, 2015. [13] ZUIDERVELD K. Graphics Gems IV [M]. San Diego: Elsevier, 1994: 474−485. [14] PIZER S M, AMBURN E P, AUSTIN J D, et al. Adaptive histogram equalization and its variations [J]. Computer Vision, Graphics, and Image Processing, 1987, 39(3): 355−368. [15] REZA A M. Realization of the contrast limited adaptive histogram equalization (CLAHE) for real-time image enhancement [J]. Journal of VLSI Signal Processing Systems for Signal Image and Video Technology, 2004, 38(1): 35−44. [16] 张铮, 王孙强, 熊盛辉, 等. 结合小波变换和CLAHE的图像增强算法[J]. 现代电子技术, 2022, 45(3): 48−51. ZHANG Zheng, WANG Sunqiang, XIONG Shenghui, et al. Image enhancement algorithm based on wavelet transform and CLAHE [J]. Modern Electronics Technique, 2022, 45(3): 48−51. [17] 张艳, 张明路, 蒋志宏, 等. 基于改进的LIP算法低照度图像增强算法[J]. 电子测量与仪器学报, 2019, 33(11): 147−154. ZHANG Yan, ZHANG Minglu, JIANG Zhihong, et al. Low-illumination image enhancement based on improved LIP model [J]. Journal of Electronic Measurement and Instrumentation, 2019, 33(11): 147−154. [18] 明浩, 苏喜友. 利用特征分割和病斑增强的杨树叶部病害识别[J]. 浙江农林大学学报, 2020, 37(6): 1159−1166. MING Hao, SU Xiyou. Image recognition of poplar leaf diseases with feature segmentation and lesion enhancement [J]. Journal of Zhejiang A&F University, 2020, 37(6): 1159−1166. [19] 宋俊杰, 宋欣, 何建祥, 等. 基于图像增强的温室图像特征点提取[J]. 计算技术与自动化, 2022, 41(2): 92−99. SONG Junjie, SONG Xin, HE Jianxiang, et al. Feature points extraction of greenhouse image based on image enhancement [J]. Computing Technology and Automation, 2022, 41(2): 92−99. [20] ITO T, ISHIHARA K, DEURA I, et al. Tissue characterization of uterine myometrium using the ultrasound gray-level histogram width [J]. Journal of Medical Ultrasonics, 2007, 34(3): 189−192. [21] 崔建伟, 王冬青, 刘金燕. 基于高斯模糊的单幅图像去雾算法[J]. 自动化与仪器仪表, 2021(1): 9−11. CUI Jianwei, WANG Dongqing, LIU Jinyan. Single image dehazing algorithms based on Gaussian blur [J]. Automation and Instrumentation, 2021(1): 9−11. [22] HARRIS C, STEPHENS M. A combined corner and edge detector[C]// British Machine Vision Association. Proceedings of the 4th Alvey Vision Conference (AVC) . Sheffield: University of Sheffield Press, 1988: 147−151. [23] 黎达, 邢艳秋, 黄佳鹏, 等. 基于双目立体视觉SLAM的林下实时定位[J]. 中南林业科技大学学报, 2021, 41(2): 16−22, 34. LI Da, XING Yanqiu, HUANG Jiapeng, et al. Real-time positioning in forests based on binocular stereo visual SLAM [J]. Journal of Central South University of Forestry & Technology, 2021, 41(2): 16−22, 34. [24] 高程程, 惠晓威. 基于灰度共生矩阵的纹理特征提取[J]. 计算机系统应用, 2010, 19(6): 195−198. GAO Chengcheng, HUI Xiaowei. GLCM-based texture feature extraction [J]. Computer Systems Applications, 2010, 19(6): 195−198. [25] 冯建辉, 杨玉静. 基于灰度共生矩阵提取纹理特征图像的研究[J]. 北京测绘, 2007, 21(3): 19−22. FENG Jianhui, YANG Yujing. Study of texture images extraction based on gray level co-occurence matrix [J]. Beijing Surveying and Mapping, 2007, 21(3): 19−22. [26] GONZALEZ R C, WOODS R E. 数字图像处理(2007)[M]. 阮秋琦, 译. 3版. 北京: 电子工业出版社, 2011. GONZALEZ R C, WOODS R E. Digital Image Processing (2007)[M]. RUAN Qiuqi tran. 3rd ed. Beijing: Publishing House of Electronics Industry, 2011. [27] 董心玉, 范文义, 田甜. 基于面向对象的资源3号遥感影像森林分类研究[J]. 浙江农林大学学报, 2016, 33(5): 816−825. DONG Xinyu, FAN Wenyi, TIAN Tian. Object-based forest type classification with ZY-3 remote sensing data [J]. Journal of Zhejiang A&F University, 2016, 33(5): 816−825. [28] NANNI L, BRAHNAM S, GHIDONI S, et al. Different approaches for extracting information from the co-occurrence matrix[J/OL]. PLoS One, 2013, 8(12): e83554[2024-11-24]. DOI: 10.1371/journal.pone.0083554. -

-
链接本文:
https://zlxb.zafu.edu.cn/article/doi/10.11833/j.issn.2095-0756.20240664
 点击查看大图
点击查看大图
计量
- 文章访问数: 885
- HTML全文浏览量: 376
- PDF下载量: 95
- 被引次数: 0
